checkCollision
構文
説明
collisionStatus = checkCollision(geom1,geom2)geom1 および geom2 間の衝突ステータスを返します。2 つのジオメトリが指定された姿勢で衝突している場合、collisionStatus は 1 になります。関数で衝突が見つからない場合、collisionStatus は 0 になります。
[ は、2 つのジオメトリ間に衝突が見つからない場合に各ジオメトリの最小距離 collisionStatus,sepdist,witnesspts] = checkCollision(geom1,geom2)sepdist と監視点 witnesspts を返します。
例
ジオメトリの衝突ステータスのチェック
この例では、2 つの衝突ジオメトリの衝突ステータスをチェックする方法を説明します。
ボックス型の衝突ジオメトリを作成します。
bx = collisionBox(1,2,3);
円柱型の衝突ジオメトリを作成します。
cy = collisionCylinder(3,1);
円柱を "x" 軸に沿って 2 平行移動します。
T = trvec2tform([2 0 0]); cy.Pose = T;
2 つのジオメトリをプロットします。
show(cy) hold on show(bx) xlim([-5 5]) ylim([-5 5]) zlim([-5 5]) hold off
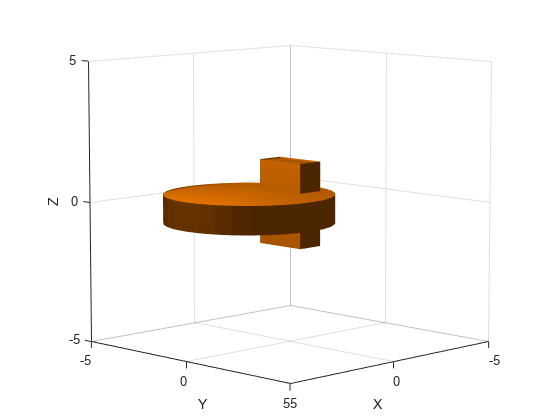
衝突ステータスをチェックします。ステータスがプロットと一貫していることを確認します。
[areIntersecting,dist,witnessPoints] = checkCollision(bx,cy)
areIntersecting = 1
dist = NaN
witnessPoints = 3×2
NaN NaN
NaN NaN
NaN NaN
ボックスを "x" 軸に沿って 3、"z" 軸を下に 4 平行移動します。ボックスと円柱が衝突していないことを確認します。
T = trvec2tform([0 3 -4]); bx.Pose = T; [areIntersecting,dist,witnessPoints] = checkCollision(bx,cy)
areIntersecting = 0
dist = 2
witnessPoints = 3×2
0.4286 0.4286
2.0000 2.0000
-2.5000 -0.5000
ボックス、円柱、および 2 つのジオメトリの間の最小距離を表す線分をプロットします。
show(cy) hold on show(bx) wp = witnessPoints; plot3([wp(1,1) wp(1,2)], [wp(2,1) wp(2,2)], [wp(3,1) wp(3,2)], 'bo-') xlim([-5 5]) ylim([-5 5]) zlim([-5 5]) hold off

衝突カプセル間の衝突のチェック
2 つの衝突カプセルを作成します。一方の中心を原点に合わせ、もう一方のカプセルの姿勢を原点から "y" 軸に沿って 3 メートル離れた位置に設定します。カプセルを表示します。
cc1 = collisionCapsule(1,4); cc2 = collisionCapsule(1,4); cc2.Pose = trvec2tform([0 3 0]); show(cc1); hold on show(cc2); axis auto hold off

2 つの衝突カプセル間の衝突をチェックします。視覚的に衝突していないため、関数から実数値の分離距離と監視点が返されるはずです。分離距離と監視点を表示します。
[isColliding,separationDist,witnessPts] = checkCollision(cc1,cc2);
disp("Separation Distance: " + num2str(separationDist))Separation Distance: 1
disp("Capsule 1 Witness Point (X Y Z): " + num2str(witnessPts(:,1)'))Capsule 1 Witness Point (X Y Z): 0 1 -2
disp("Capsule 2 Witness Point (X Y Z): " + num2str(witnessPts(:,2)'))Capsule 2 Witness Point (X Y Z): 0 2 -2
2 つ目のカプセルを "z" 軸に対して 90 度回転します。
cc2.Pose(1:3,1:3) = eul2rotm([0 0 pi/2]); show(cc1); hold on show(cc2); axis auto

カプセル間の衝突をもう一度チェックします。衝突しているため、関数から分離距離と監視点が NaN として返されます。
[isColliding,separationDist,witnessPts] = checkCollision(cc1,cc2);
disp("Separation Distance: " + num2str(separationDist))Separation Distance: NaN
disp("Capsule 1 Witness Point (X Y Z): " + num2str(witnessPts(:,1)'))Capsule 1 Witness Point (X Y Z): NaN NaN NaN
disp("Capsule 2 Witness Point (X Y Z): " + num2str(witnessPts(:,2)'))Capsule 2 Witness Point (X Y Z): NaN NaN NaN
入力引数
出力引数
制限
最小距離が 10-5 m 未満の場合、衝突チェックの結果は信頼性が低くなります。
参照
[1] Gilbert, E.G., D.W. Johnson, and S.S. Keerthi. "A fast procedure for computing the distance between complex objects in three-dimensional space." IEEE Journal on Robotics and Automation 4, no. 2 (April 1988): 193–203. https://doi.org/10.1109/56.2083.
拡張機能
バージョン履歴
R2019b で導入
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)