MATLAB および Simulink とのシーンの統合
RoadRunner シーンを MATLAB および Simulink と統合して、バーチャル環境で自動運転アルゴリズムを開発およびテストするためのワークフローを用意できます。この統合により、RoadRunner で詳細かつフォトリアリスティックなシーンを作成し、それを MATLAB および Simulink で使用してアルゴリズムの開発とテストを行うことができます。
自動運転ワークフローは、データのインポートと変換から解析、シミュレーション、可視化に至るプロセス全体をカプセル化します。RoadRunner のシーンを作成し、シナリオ シミュレーション用に Simulink と互換性のあるファイル形式にエクスポートできます。次にそれらのシーンを使用し、車両、センサー、天候条件が含まれた動的シナリオ環境で運転アルゴリズムをテストできます。
自動運転ワークフローの以下のさまざまな段階で、MATLAB および Simulink をシーンに統合できます。
シーンのインポートとエクスポート:
グラフィカル インターフェイスと、3D モデルおよびアセットを含む RoadRunner Asset Library を使用して、RoadRunner でシーンを最初から設計できます。ASAM OpenDRIVE® や Zenrin SD Maps などのさまざまな形式のデータをインポートすることもできます。Here や TomTom などの HD マップ データまたは独自のカスタム形式で作業する場合は、RoadRunner Scene Builder を使用してそれらのマップを RoadRunner にインポートできます。
また、RoadRunner では、シーンやプロジェクトの開閉や保存、シーンのインポートやエクスポートなどの一般的なワークフロー タスクを実行するための MATLAB 関数も用意されています。
RoadRunner で作成したシーンは、MATLAB および Simulink と互換性のある ASAM OpenDRIVE や Filmbox などのファイル形式にエクスポートできます。
自動化: RoadRunner のシーンを MATLAB と統合すると、MATLAB スクリプトを使用して、一括エクスポート、シミュレーションの実行、RoadRunner のデータに基づいたモデルの更新などの反復タスクを自動化できます。
アルゴリズムの設計と解析: MATLAB および Simulink を使用して、アダプティブ クルーズ コントロール、緊急ブレーキ、車線変更、隊列走行、駐車などの現実世界の動作を模倣する運転アプリケーションをシミュレートできます。これらの動作のシミュレーション結果により、RoadRunner における後続のシミュレーションやモデル調整に影響を与え、忠実度の高いアルゴリズムによる反復プロセスを作成できます。
そのため、この統合ワークフローを使用することで、データの取り扱いと処理を自動化し、手作業およびエラーの可能性を低減できます。プロジェクトの拡大に合わせて、アルゴリズムを簡単に適応させて、より大きなデータセットやより複雑なシミュレーションを処理できます。これは、プロセスが一貫しており、異なるデータセットやプロジェクトに対して複製できるということも意味します。
MATLAB のオブジェクトおよび関数
ブロック
| RoadRunner Scenario | Simulink アクター モデルのインターフェイスを定義する (R2022a 以降) |
| RoadRunner Scenario Reader | Reads selected topic from RoadRunner scenario (R2022a 以降) |
| RoadRunner Scenario Writer | Write selected topic to RoadRunner scenario (R2022a 以降) |
トピック
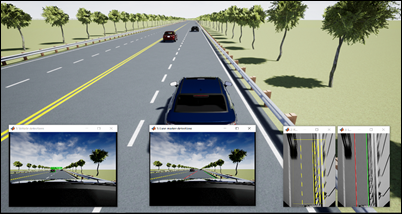
- Highway Lane Following with RoadRunner Scene (Automated Driving Toolbox)
Simulate a highway lane following application using a scene created in the RoadRunner 3D scene editing tool.
- 楕円形のトラックの作成および使用 (Vehicle Dynamics Blockset)
RoadRunner で楕円形のトラックを作成し、Unreal® とのコシミュレーションを実行する Vehicle Dynamics Blockset™ のシミュレーションで使用する。
- Connect MATLAB and RoadRunner to Control and Analyze Simulations (Automated Driving Toolbox)
Use MATLAB with RoadRunner to control simulations programmatically and model actors in MATLAB or Simulink.
- Overview of Simulating RoadRunner Scenarios with MATLAB and Simulink (Automated Driving Toolbox)
This topic describes workflows to create actor behaviors in MATLAB or Simulink, associate the behaviors with graphical actors in RoadRunner Scenario, start the scenario simulation in RoadRunner, and log simulation results for further analysis.
- Export Driving Scenario to RoadRunner Scenario Simulation (Automated Driving Toolbox)
Export a driving scenario to RoadRunner scenario and launch RoadRunner using the
startRoadRunnerForScenariofunction or the Driving Scenario Designer app. - Import RoadRunner Scene into Unreal Engine Using Simulink (Automated Driving Toolbox)
Import a scene built in RoadRunner into an Unreal Engine simulation in Simulink to generate vision detections and ground-truth semantic segmentation labels for the scene.
注目の例

MATLAB を使用した複数のシーンのエクスポート
関数 MATLAB を使用して、プロジェクト内のすべての RoadRunner シーンをサポートされる形式にエクスポートする。
MATLAB 関数を使用した形式間でのシーンの変換
MATLAB 関数を使用して、RoadRunner プロジェクト内の複数のシーンをインポートし、サポートされる形式にエクスポートする。

Build Pikes Peak RoadRunner 3D Scene Using RoadRunner HD Map
Build RoadRunner 3D scene for Pikes Peak, Colorado using MATLAB functions.