診断特徴デザイナーを使用した劣化システムの特徴の予知ランク付け
この例では、悪化していくシャフト故障の形跡を含むセグメント化されたデータを処理して特徴抽出を行う方法と、予知ランク付けを使用して残存耐用期間 (RUL) を決定するのに最も適した特徴を特定する方法を説明します。RUL 特徴の作成は、状態によってグループ化したデータによってではなく、故障に至るまで実行されたデータに基づいて行います。
この例は、アプリの基本操作に習熟していることを前提としています。アプリの使用方法のチュートリアルについては、予知保全アルゴリズムの状態インジケーターの設計を参照してください。
モデルの説明
以下の図は、6 つのギアをもつドライブトレインを示しています。ドライブトレインのモーターには、振動センサーが取り付けられています。このドライブトレインにタコメーターはありません。モーターは 1800 rpm の一定の回転速度で駆動し、変動はありません。このドライブトレインは、以下のとおりです。
モーター シャフト上のギア 1 は、ギア 2 とギア比 17:1 で噛み合います。
最終ギア比、すなわち、ギア 1 と 2 と、ギア 3 と 4 の比は 51:1 です。
モーター シャフト上のもう 1 つのギア 5 は、ギア 6 とギア比 10:1 で噛み合います。

このドライブトレインを 10 台のシミュレーション マシンが使用します。すべてのマシンにおいて、ギア 6 のシャフトに故障が発生しています。この故障は日ごとに悪化していきます。故障の進行速度はマシンごとに固定ですが、マシン間ではばらつきがあります。
データは、15 日間にわたって 1 日 1 回 0.21 秒間記録されました。マシンごとに、日別のセグメントが 1 つの変数内の隣接する位置に格納されます。タイムスタンプは、データ記録時間を反映して連続的に増加します。たとえば、1 日目の最後のサンプルのタイムスタンプが tf でサンプル時間が Ts の場合、2 日目の最初のサンプルのタイムスタンプは tf + Ts になります。
データのインポートと表示
まず、データを MATLAB® ワークスペースに読み込み、[診断特徴デザイナー] アプリを開きます。
load(fullfile(matlabroot, 'toolbox', 'predmaint', 'predmaintdemos', ... 'motorDrivetrainDiagnosis', 'machineDataRUL3'), 'motor_rul3') diagnosticFeatureDesigner
データをインポートします。そのためには、[特徴デザイナー] タブで [新規セッション] をクリックします。次に、[新規セッション] ウィンドウの [変数の追加選択] エリアで、ソース変数として [motor_rul3] を選択します。

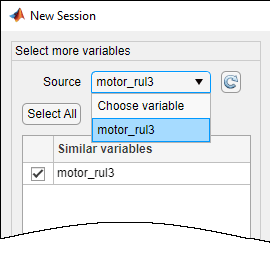
既定の構成と変数を受け入れ、インポート プロセスを完了します。このアンサンブルは、1 つのデータ変数 Signal/vib で構成されており、それには振動信号が格納されています。状態変数はありません。
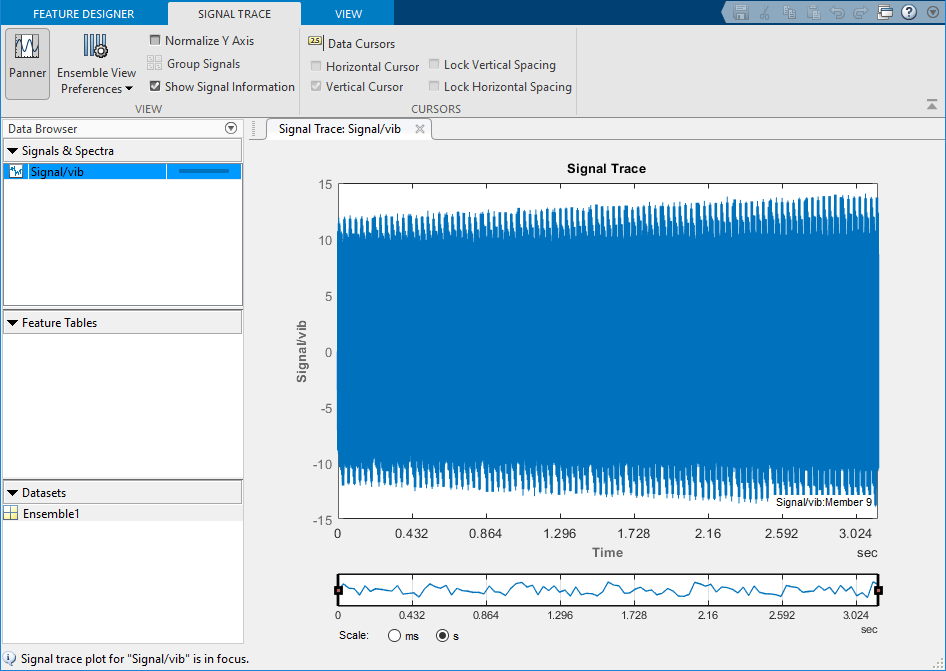
振動信号を表示します。そのためには、[データ ブラウザー] で信号を選択し、[信号トレース] を使用してプロットします。欠陥の進行とともに、信号の振幅が連続的に増加しています。
フレームによる日別セグメントの分割
RUL に使用する特徴を作成するときの関心対象は、特定の故障を分離することではなく、劣化の進行を追跡することです。有用な RUL 特徴の時系列履歴を取ることで、劣化速度が可視化され、最終的には故障時期の予測が可能になります。
フレームベースの処理を使用することで、劣化の進行をセグメントごとに追跡できます。些細な変化も急激な変化も、それが発生したセグメント内で捉えられます。セグメントベースの特徴は、信号全体から抽出された特徴よりも、劣化の記録を正確に伝えます。RUL を予測するうえで、劣化の進行速度は特定の時間の欠陥の重大性と同じくらい重要です。
各マシンのデータセットは、日別に 1 セグメントのデータを提供することで、セグメント化された処理をサポートしています。フレームベースの処理を指定すると、これらのセグメントがセグメントごとに別々に処理されるようになります。データは 0.21 秒間のセグメントで収集されていることから、処理対象のデータを 0.21 秒ごとのフレームに分割します。
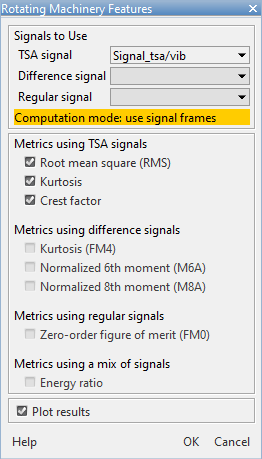
[計算オプション] をクリックします。ダイアログ ボックスで [データ処理モード] を [フレームベース] に設定します。データ セグメントは互いに隣接しているため、フレーム サイズとフレーム レートの両方を 0.21 秒に設定します。

時間同期平均化の実行
時間同期平均化 (TSA) は、信号を 1 回転について平均化して、回転とコヒーレントでないノイズを大きく削減します。TSA でフィルターされた信号は、特徴生成をはじめとして、多くの回転機械解析のベースとして利用できます。
この例では、回転速度は各マシンで同一の 1800 rpm の値に固定されています。
TSA 信号を計算するには、[フィルター処理と平均化]、[時間同期信号平均化] を選択します。ダイアログ ボックスで以下を行います。
[信号] の選択を確認します。
[タコメーター情報] で [一定の回転速度 (RPM)] を選択し、値を
1800に設定します。その他すべての設定を受け入れます。

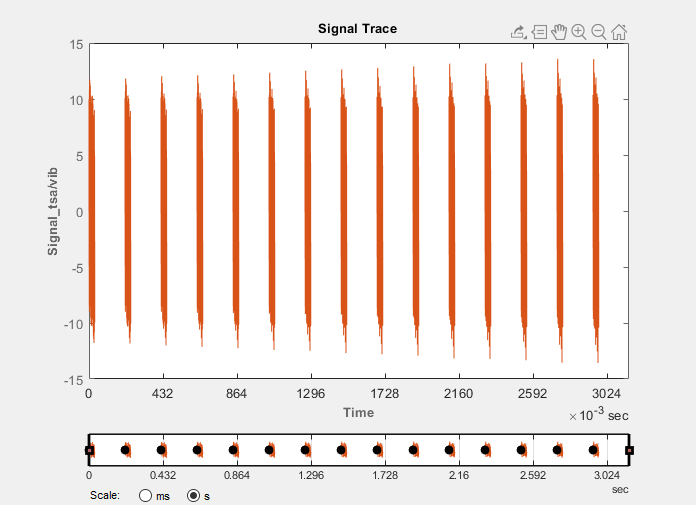
アプリにより各セグメントの TSA 信号が別々に計算されます。既定では、1 つ目のセグメントがプロットされます。

パナーを使用して、すべてのセグメントにプロットを拡大します。プロットから振幅のわずかな増加が見てとれます。
回転機の特徴の抽出
TSA 信号を使用して、時間領域の回転機の特徴を計算します。
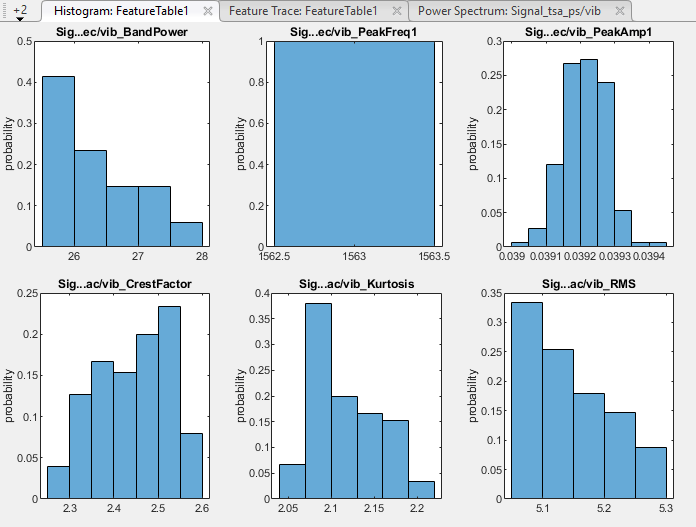
状態変数がないため、結果のヒストグラムには、セグメント間の特徴値の分布のみが表示されます。

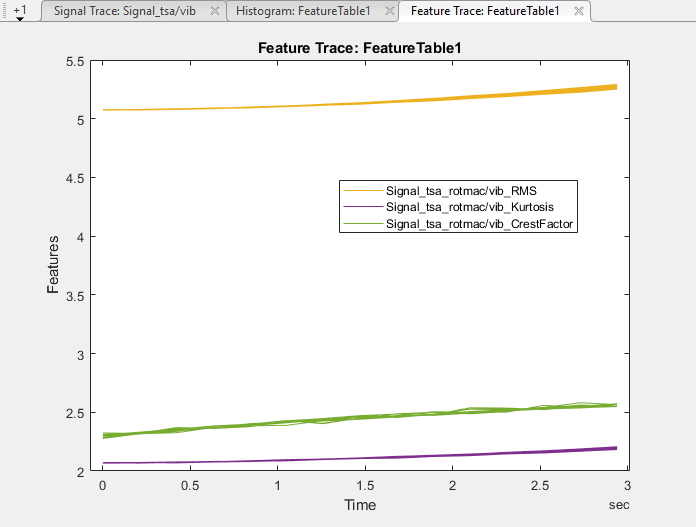
特徴トレース プロットを表示して、時系列の特徴の変化を確認することもできます。そのためには、[特徴テーブル] で FeatureTable1 を選択します。プロット ギャラリーで [特徴トレース] を選択します。

この特徴トレース プロットでは、3 つの特徴すべてが、連続的な劣化に対応する上向きの傾きを示しています。これらの特徴は正規化されていない異なるメトリクスを表しているため、特徴の値の相対関係に意味はありません。
スペクトル特徴の抽出
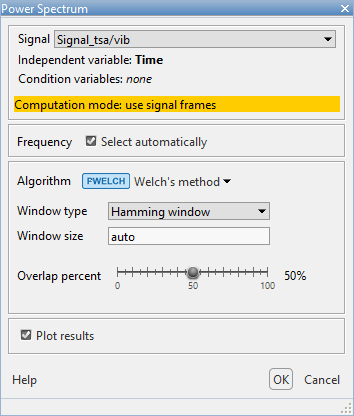
スペクトルの特徴は、通常、欠陥によって周期的な発振が起こる場合に有用です。TSA 信号からスペクトル特徴を抽出します。まず、パワー スペクトルを計算します。そのためには、[スペクトル推定]、[パワー スペクトル] を選択します。TSA 信号を選択し、[アルゴリズム] を [ウェルチ法] に変更します。
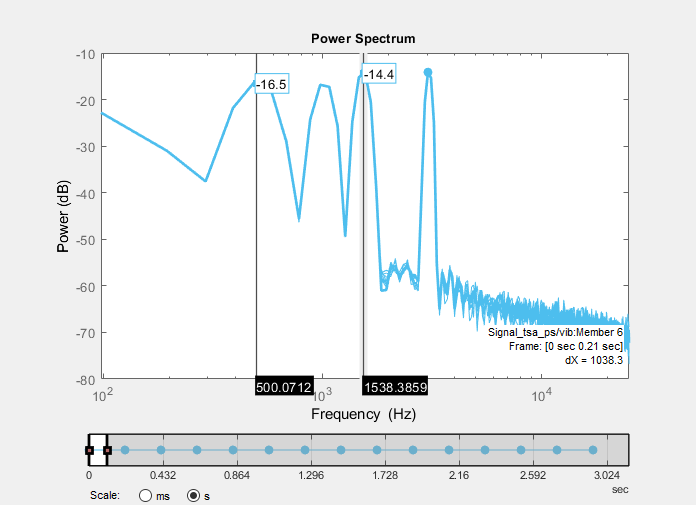
最初のセグメントのスペクトルには、500 Hz と 1540 Hz の周辺に明らかなピークがあります。回転速度は 1800 rpm、すなわち 30 Hz です。これらのピーク周波数との比はおよそ 17 と 51 で、ギア比と一致しています。介在するピークは、これらの周波数の追加の高調波です。
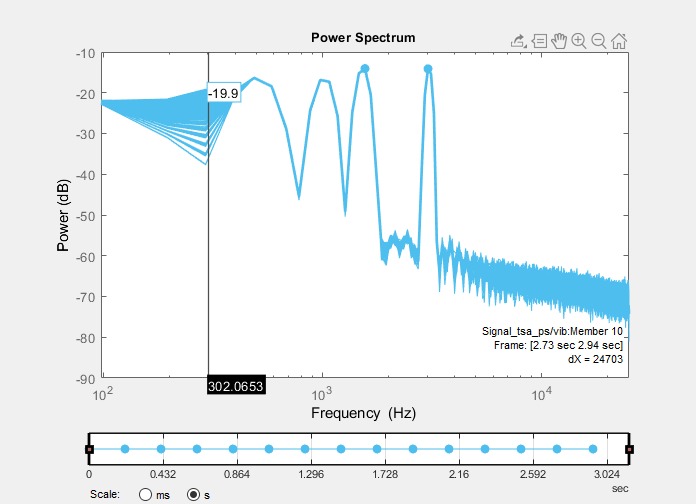
次数領域と周波数領域では、セグメント スペクトルは重ね合わされます。パナーを使用することで、時間領域と同じように複数のセグメントを選択できます。すべてのセグメントを含むようにパナーを設定します。セグメントの数を増やしていくと、パワーが 300 Hz で増加します。この周波数は 30 Hz の回転速度の 10 次に相当し、欠陥の増大を表しています。
スペクトル特徴を抽出します。そのためには、[スペクトルの特徴] をクリックし、[スペクトル] が対象のパワー スペクトルに設定されていることを確認します。スライダーを使用して範囲を約 4000 Hz までにし、領域をピークに限定します。パワー スペクトル プロットが対数スケールから線形スケールに自動的に変わり、選択した範囲にズーム インします。


これで、結果のヒストグラム プロットにスペクトル特徴が含まれるようになりました。
帯域パワー特徴トレースをプロットして、全セグメントのパワー スペクトルと比較します。[特徴の選択] を使用して、他の特徴トレースをクリアします。


帯域パワー特徴は、各マシンの欠陥の進行を捉えています。他の 2 つのスペクトル特徴は、欠陥の進行を追跡していません。

予知ランク付け手法による特徴のランク付け
特徴をランク付けして、RUL の予測に最も適した特徴を特定します。アプリには 3 つの予知ランク付け方法が用意されています。
"単調性" は、システムが故障に近づく際に特徴のトレンドがもつ特性。システムが徐々に故障に近づくにつれ、適切な状態インジケーターは単調増加または単調減少のトレンドをもちます。詳細については、
monotonicityを参照してください。"トレンド可能性" は、故障に至るまで実行された複数の実験で測定された、特徴の軌跡間に見られる類似性の尺度。状態インジケーター候補のトレンド可能性は、測定値間の最小絶対相関として定義されます。詳細については、
trendabilityを参照してください。"予知可能性" は、故障時の特徴の変動性を、その初期値と最終値間の範囲と比較した尺度。予知可能性の高い特徴は、その初期値と最終値間の範囲と比較して故障時の変動が小さくなります。詳細については、
prognosabilityを参照してください。
[特徴のランク付け] をクリックし、[FeatureTable1] を選択します。状態変数がないため、アプリは既定の予知ランク付け手法 [単調性] に設定します。

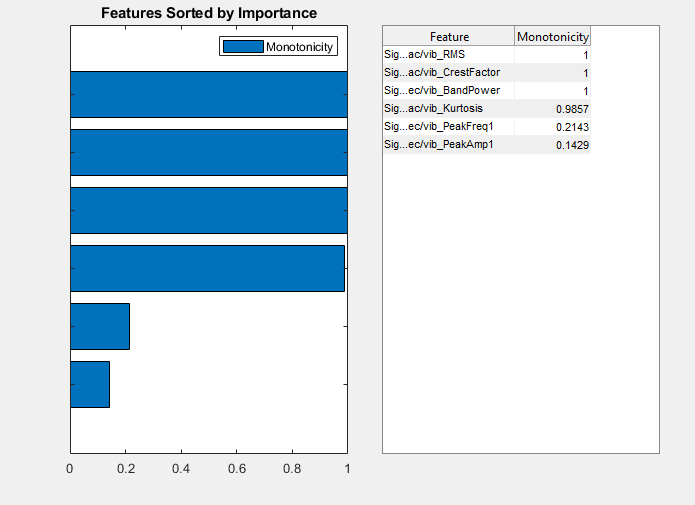
特徴のうちの 4 つは、スコアが最大値またはそれに近くなります。2 つの特徴 PeakAmp1 および PeakFreq1 のスコアはかなり低くなります。
その他の 2 つの予知方法のランク付けを追加します。[予知ランク付け] をクリックし、[トレンド可能性] を選択します。[適用] をクリックしてから [トレンド可能性を閉じる] をクリックします。
[予知可能性] に対して前の手順を繰り返します。これで、ランク付けプロットには 3 つすべてのランク付け方法の結果が含まれるようになりました。

ランク付け結果は、スペクトル特徴の抽出でプロットされる特徴トレースと一致します。
悪化している故障を追跡する特徴は
[単調性]のスコアが高くなります。こうした特徴のスコアは他の 2 つの方法でも高くなります。ランク付け
[単調性]のスコアが 2 番目に低い[PeakFreq1]は、[トレンド可能性]と[予知可能性]の両方でスコアが高くなっています。こうした高スコアは、特徴の軌跡がほぼ一致していること、そして故障が最大となっているシミュレーション終了時の変動性が低いことが要因です。[PeakAmp1]はすべてのランク付けで低いスコアになっています。これは、この特徴が欠陥の進行の影響を受けないこと、さらにこの特徴に関するマシンの値が変化することを反映しています。
4 つの特徴はすべてのカテゴリで高いスコアを得ているため、RUL アルゴリズムで進めていくための特徴セットとしてこれらの特徴を選択します。
参考
診断特徴デザイナー | monotonicity | trendability | prognosability