phased.GLRTDetector
Description
The generalized likelihood ratio test detector (GLRT) can detect signals with unknown parameters in the presence of noise. Unknown parameters include signal amplitude, phase, frequency, and arrival times. The detector replaces unknown parameters with their maximum likelihood estimates under the signal absent hypothesis H0 or the alternative signal present hypothesis H1 and then uses the LRT detector to output detection results.
Create the
phased.GLRTDetectorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
detector = phased.GLRTDetectordetector
System object™ with default properties.
detector = phased.GLRTDetector(Name = Value)detector
System object with the specified property Name set to the specified
Value. You can specify additional name-value pair arguments in any
order as (Name1 = Value1, …
,NameN = ValueN).
Properties
Usage
Syntax
Description
You can combine optional input and output arguments when their enabling properties are
set. Optional inputs and outputs must be listed in the same order as the order of the
enabling properties. For example, [Y,stat,th,estparam] =
detector(X,hyp,obs,ncov).
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Perform GLRT detection on a real Gaussian noise matrix with a desired probability of false alarm of 0.1. Assume that the signal dimension is 4, the noise power is unknown, and there are 2 unknown signal parameters with true values 0. Use a 3-model observation matrix. Perform the detection on all samples of the input and evaluate the probability of false alarm.
rng(10031); glrt = phased.GLRTDetector( ... DataComplexity = 'Real', ... ProbabilityFalseAlarm = 0.1); N = 4; M = 1000; p = 2; D = 3; x = randn(N,M); hyp = [eye(p) zeros(p,1)]; obs = randn(N,p,D); dresult = glrt(x,hyp,obs); Pfa = sum(dresult,2)/M
Pfa = 3×1
0.0970
0.1030
0.1110
Perform Generalized Likelihood Ratio Threshold detection on complex Gaussian noise matrix with a desired probability of false alarm of 0.1. Assume that the signal dimension is 5. Also assume that the noise power is unknown. Assume there is only one unknown signal parameter with a true value zero. Use a single-model observation matrix. Perform the detection on all samples of the input and evaluate the probability of false alarm.
rng default glrt = phased.GLRTDetector(DataComplexity = 'Complex', ... ProbabilityFalseAlarm = 0.1); N = 5; M = 1000; x = 1/sqrt(2)*(randn(N,M)+1i*randn(N,M)); hyp = [1 0]; obs = ones(N,1); dresult = glrt(x,hyp,obs); Pfa = sum(dresult)/M
Pfa = 0.1060
Perform GLRT detection on a complex Gaussian noise matrix with a desired probability of false alarm of 0.1. Assume that the signal dimension is 2 and that the noise power is unknown. There is only 1 unknown signal parameter with true value 0. Use a single-model observation matrix. Perform the detection on all samples of the input and evaluate the probability of false alarm.
Create the 1000 samples of Gaussian random data.
rng default
N = 2;
M = 1000;
x = 1/sqrt(2)*(randn(N,M) + 1i*randn(N,M));Create the GLRT detector System object™.
glrt = phased.GLRTDetector(DataComplexity = 'complex', ... ProbabilityFalseAlarm = 0.1);
Specify the observation and hypotheses matrices.
hyp = [1 0]; obs = ones(N,1);
Solve and display the first 15 of the detection results.
dresult = glrt(x,hyp,obs); disp(dresult(1:15))
0 0 0 0 1 0 0 0 0 1 0 0 0 0 0
Estimate the probability of false alarm.
Pfa = sum(dresult)/M
Pfa = 0.0930
The probability of false alarm is close to the desired probability of 0.1.
Perform GLRT detection on a given complex Gaussian noise matrix with a desired probability of false alarm of 0.1. Assume that the signal dimension is 4 and the noise power is unknown. There are 2 unknown signal parameters with true values 0. Use a 3-model observation matrix. Perform the detection on all samples of the input and evaluate the probability of false alarm.
Create the random data.
rng default
N = 4;
M = 1000;
P = 2;
D = 3;
x = 1/sqrt(2)*(randn(N,M)+1i*randn(N,M));Create the phased.GLRTDetector System object™.
glrt = phased.GLRTDetector(DataComplexity = 'complex', ... ProbabilityFalseAlarm = 0.1); hyp = [eye(P) zeros(P,1)]
hyp = 2×3
1 0 0
0 1 0
obs = randn(N,P,D) + 1i*randn(N,P,D);
Run the detector and compute the probability of false alarm.
dresult = glrt(x,hyp,obs); pfa = sum(dresult,2)/M
pfa = 3×1
0.0890
0.0980
0.0970
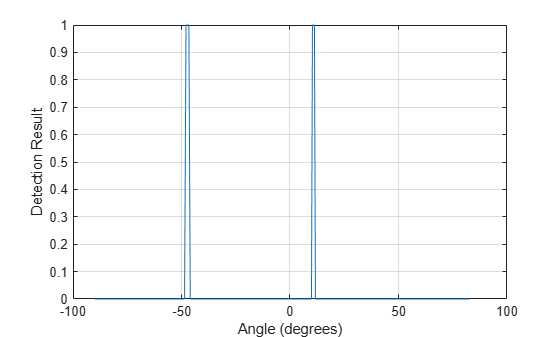
Perform angle-domain GLRT detection for two targets located at 11 and -47 degrees with a desired probability of false alarm of 0.01. Use a ULA of dimension 128 to receive a single-snapshot signal with complex white Gaussian noise. The noise power and target complex amplitudes are unknown. Use a 256-model observation matrix, where each model checks the existence of a target following that model. Perform the detection on the input and plot the detection result.
rng default glrt = phased.GLRTDetector(DataComplexity = 'complex', ... ProbabilityFalseAlarm = 0.01);
Create two targets located at 11 and -47 degrees.
tarAng = [11,-47]; tarNum = length(tarAng);
Start with a ULA array with 128 elements having 1/2-wavelength element spacing.
N = 128;
fc = 3e8;
elementPos = (0:N-1)*physconst('LightSpeed')/fc/2;Create single-snapshot received signal from two targets at the ULA.
tarAmp = 1/sqrt(2)*(randn(tarNum,1) + 1i*randn(tarNum,1)); signal = steervec(elementPos,tarAng)*tarAmp;
Single-snapshot of complex white Gaussian noise at the ULA.
noise = 1/sqrt(2)*(randn(N,1) + 1i*randn(N,1));
Add the noise to the signal.
x = signal + noise;
Partition angle into 256 angle bins
D = 256; angGrid = asind(2*(-D/2:D/2-1)/D);
Perform GLRT detection on 256 signal models. Each model assumes one target. % N-by-1-by-D
obs = permute(steervec(elementPos,angGrid),[1 3 2]); hyp = [1,0]; dresult = glrt(x,hyp,obs);
Plot the GLRT detection results at the 256 angle bins.
plot(angGrid,dresult) xlabel('Angle (degrees)') ylabel('Detection Result') grid on
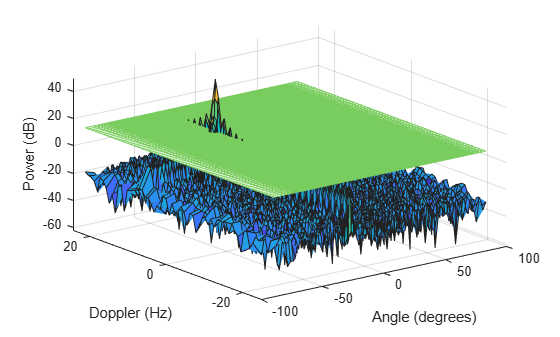
Perform angle-Doppler-domain GLRT detection for a target located at 28 degree at a Doppler of 10 Hz with a desired probability of false alarm of 1e-6. Use a ULA of dimension 128 to receive a 32-pulse signal under complex white Gaussian noise. The noise power and target complex amplitude are unknown. Use an observation matrix with 256-by-64 angle-Doppler models, where each model checks the existence of a target following that model. Perform the detection on the input and plot the spatial-temporal detection map.
rng default glrt = phased.GLRTDetector('DataComplexity','complex',... 'ProbabilityFalseAlarm',1e-6,... 'ThresholdOutputPort',true);
Target is located at 28 degree at a Doppler of 10 Hz.
tarAng = -28; tarDop = 10;
Create a ULA with 128 elements and with elements spaced at 1/20-wavelength.
elementNum = 128;
fc = 3e8;
elementPos = (0:elementNum-1)*physconst('LightSpeed')/fc/2;ULA observes 32 pulses at a PRF of 50 Hz
fPRF = 50; pulseNum = 32;
Create the spatial-temporal signal from the target at the ULA.
tarAmp = 1/sqrt(2)*(randn + 1i*randn); dopSv = dopsteeringvec(tarDop,pulseNum,fPRF); angSv = steervec(elementPos,tarAng); signal = kron(dopSv,angSv)*tarAmp;
Add the spatial-temporal complex white Gaussian noise at the ULA.
noisePow = 0.01; N = elementNum*pulseNum; noise = sqrt(noisePow/2)*(randn(N,1) + 1i*randn(N,1)); x = signal + noise;
Partition angle into 256 angle bins and Doppler into 64 Doppler bins
angNum = 256; dopNum = 64; angGrid = asind(2*(-angNum/2:angNum/2-1)/angNum); dopGrid = fPRF*(-dopNum/2:dopNum/2-1)/dopNum; D = angNum*dopNum;
Perform GLRT detection on 256-by-64 angle-Doppler models, each assuming 1 target.
obs = zeros(N,1,D); for dopBin = 1:dopNum dopGridSv = dopsteeringvec(dopGrid(dopBin),pulseNum,fPRF); for angBin = 1:angNum angGridSv = steervec(elementPos,angGrid(angBin)); angDopGridSv = kron(dopGridSv,angGridSv); obs(:,:,(dopBin-1)*angNum+angBin) = angDopGridSv; end end hyp = [1,0]; [dresult,stat,th] = glrt(x,hyp,obs); stat = reshape(stat,angNum,dopNum);
Plot a spatial-temporal GLRT detection map.
[dopMesh,angMesh] = meshgrid(dopGrid,angGrid); surf(angMesh,dopMesh,pow2db(stat)) hold on mesh(angMesh,dopMesh,pow2db(th)*ones(angNum,dopNum)) xlabel('Angle (degrees)') ylabel('Doppler (Hz)') zlabel('Power (dB)')
More About
References
[1] Steven M. Kay, Fundamentals of Statistical Signal Processing, Detection Theory, Prentice-Hall PTR, 1993.
[2] Mark A. Richards, Fundamentals of Radar Signal Processing, Third edition, McGraw-Hill Education, 2022.
Extended Capabilities
Version History
Introduced in R2023b
See Also
phased.LRTDetector | npwgnthresh | rocsnr | rocpfa | phased.CFARDetector | phased.CFARDetector2D