validatorVehicleCostmap
2 次元コストマップに基づいた状態バリデーター
説明
validatorOccupancyMap オブジェクトは、2 次元コストマップ内の値に基づいて、状態および離散化された運動を検証します。validatorVehicleCostmap は、占有されているマップ領域や不明なマップ領域を無効な状態として解釈します。空きマップ領域のみが有効と解釈されます。
作成
構文
説明
validator = validatorVehicleCostmap
validator = validatorVehicleCostmap(stateSpace)nav.StateSpace から派生した特定の状態空間定義でバリデーターを作成します。
validator = validatorVehicleCostmap(stateSpace,Name,Value)Name,Value を使用して Map プロパティまたは XYIndices プロパティを指定します。
プロパティ
オブジェクト関数
copy | Create deep copy of state validator object |
isStateValid | Check if state is valid |
isMotionValid | Check if path between states is valid |
例
この例では、環境を通るパスを検証する方法を説明します。
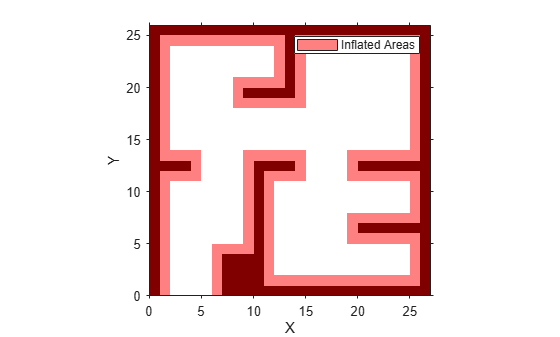
例のマップを読み込みます。単純なマップを使用してビークル コスト マップを作成します。1 メートルのインフレーション半径を指定します。
load exampleMaps.mat map = vehicleCostmap(double(simpleMap)); map.CollisionChecker = inflationCollisionChecker("InflationRadius",1); plot(map)
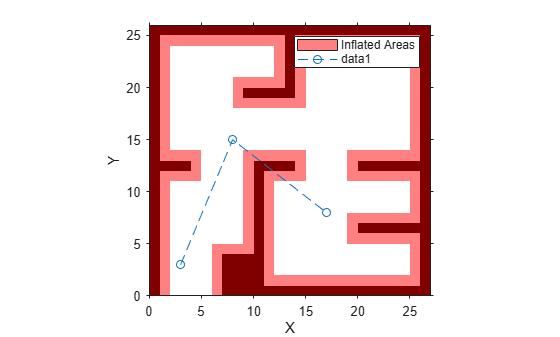
マップを通る粗いパスを指定します。
path = [3 3 pi/2; 8 15 0; 17 8 -pi/2]; hold on plot(path(:,1),path(:,2),"--o")
stateSpaceSE2 定義を使用して状態バリデーターを作成します。マップと、パス セグメントを内挿し検証するための距離を指定します。
validator = validatorVehicleCostmap(stateSpaceSE2); validator.Map = map; validator.ValidationDistance = 0.1;
パスの点が有効な状態であることをチェックします。3 つの点はすべて自由空間にあるため、有効と見なされます。
isValid = isStateValid(validator,path)
isValid = 3×1 logical array
1
1
1
連続する各パス状態の間の運動をチェックします。関数 isMotionValid は、状態間のパスに沿って内挿を行います。パス セグメントが無効な場合は、パスに沿った最後の有効な点をプロットします。
startStates = [path(1,:);path(2,:)];
endStates = [path(2,:);path(3,:)];
for i = 1:2
[isPathValid, lastValid] = isMotionValid(validator,startStates(i,:),endStates(i,:));
if ~isPathValid
plot(lastValid(1),lastValid(2),'or')
end
end
hold off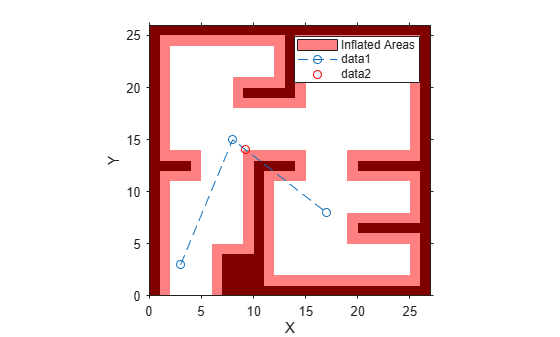
拡張機能
バージョン履歴
R2019b で導入