plannerAStarGrid
グリッド マップの A* パス プランナー
説明
plannerAStarGrid オブジェクトは、A* パス プランナーを作成します。このプランナーは、占有マップで A* 探索を実行し、グリッドの指定された開始位置からゴール位置までの障害物のない最短のパスを見つけます。最短のパスはヒューリスティック コストによって決定されます。
作成
構文
説明
planner = plannerAStarGridbinaryOccupancyMap オブジェクトを使用して plannerAStarGrid オブジェクトを作成します。
planner = plannerAStarGrid(map)map を使用して plannerAStarGrid を作成します。map は binaryOccupancyMap オブジェクトまたは occupancyMap オブジェクトとして指定します。map 入力は、Map プロパティの値を設定します。
planner = plannerAStarGrid(___,Name,Value)
たとえば、plannerAStarGrid(map,'GCost','Manhattan') は、Manhattan コスト関数を使用して A* パス プランナー オブジェクトを作成します。
プロパティ
オブジェクト関数
例
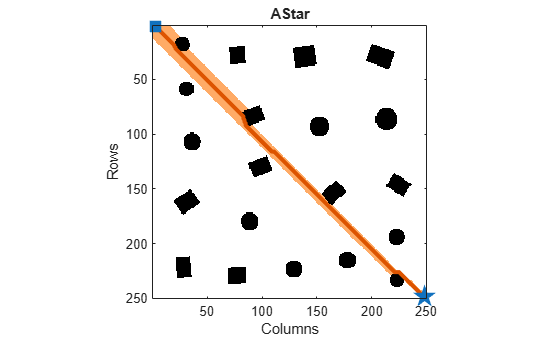
A* パス計画アルゴリズムを使用して、障害物グリッド マップを通る衝突のない最短のパスを計画します。
関数mapClutterを使用して、障害物がランダムに散乱したbinaryOccupancyMapオブジェクトを生成します。
rng('default');
map = mapClutter;マップを使用してplannerAStarGridオブジェクトを作成します。
planner = plannerAStarGrid(map);
開始点とゴール点を定義します。
start = [2 3]; goal = [248 248];
開始点からゴール点までのパスを計画します。
plan(planner,start,goal);
オブジェクト関数showを使用してパスおよび探索されたノードを可視化します。
show(planner)
拡張機能
バージョン履歴
R2020b で導入