BLDC
ライブラリ:
Motor Control Blockset /
Electrical Systems /
Motors
説明
BLDC ブロックは、120 電気角度の位置範囲にわたって一定に保たれる台形逆起電力をもつ三相ブラシレス DC (BLDC) モーターを実装します。このブロックは三相入力電圧を使用して、個々の相電流を調整し、モーターのトルクや角速度を制御できるようにします。
既定では、このブロックは [シミュレーション タイプ] パラメーターを [連続] に設定して、シミュレーション時に連続サンプル時間を使用します。ブロックを固定ステップ シミュレーションで使用する場合は、パラメーターを [離散] に設定します。その後、[サンプル時間 (s)] パラメーターを指定します。
モーターの構造
次の図は、単一の極対があるモーターを示しています。
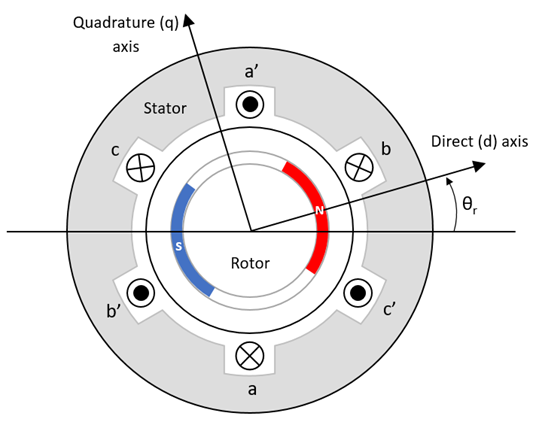
永久磁石によってモーターの磁場が生成され、これによりモーターの角度に基づく台形の磁束変化率が得られます。
座標軸の規則で、モーターの角度 θr が 0 の場合に a 相と永久磁石の磁束が揃います。
三相正弦波モデルの電気システム
ブロックは標準の dq 基準座標系の代わりに、次の変換方程式によって定義される d’q’ 基準座標系を使用します。
このブロックは、BLDC モーターの dq 基準座標系および d’q’ 基準座標系で表された次の方程式を実装します。モーターの基準座標系のすべての数量は固定子の A 相を基準としています。
次の表では、これらの方程式で使用されている変数について説明します。
Lq, Ld | q 軸と d 軸のインダクタンス (H) |
R | 固定子巻線の抵抗 (Ω) |
iq', id' | q' 軸と d' 軸の電流 (A) |
vq', vd' | q' 軸と d' 軸の電圧 (V) |
ωm | モーターの機械角速度 (rad/s) |
ωe | モーターの電気角速度 (rad/s) |
P | 極対数 |
Te | 電磁トルク (Nm) |
Θe | 電気角 (rad) |
Va, Vb, Vc | 固定子の A 相、B 相、C 相の電圧 (V) |
ia, ib, ic | 固定子の A 相、B 相、C 相の電流 (A) |
Ea, Eb, Ec | 固定子の A 相、B 相、C 相の逆起電力 (Vpk_LL/krpm (毎分キロ回転あたりのピーク電圧 (線間))) |
Ψa, Ψb, Ψc | 各固定子巻線と鎖交する合計磁束 (Wb) |
機械システム
モーターの角速度は次のように求められます。
方程式では次の変数を使用します。
J | モーターと負荷を合わせた慣性 (kgm^2) |
F | モーターと負荷を合わせた粘性摩擦 (N·m/(rad/s)) |
θm | モーターの機械角度位置 (rad) |
Tm | モーター シャフトのトルク (Nm) |
Te | 電磁トルク (Nm) |
Tf | モーター シャフトの静止摩擦トルク (Nm) |
ωm | モーターの機械角速度 (rad/s) |
振幅不変 dq 変換
このブロックは次の方程式を使用して、dq と三相振幅が確実に等しくなるようにするための振幅不変 dq 変換を実装します。
方程式では次の変数を使用します。
Θda | 回転子の a 軸に対する dq 固定子電気角 (rad) |
vsq, vsd | 固定子の q 軸と d 軸の電圧 (V) |
isq, isd | 固定子の q 軸と d 軸の電流 (A) |
| va, vb, vc | 固定子の電圧の a 相、b 相、c 相 (V) |
| ia, ib, ic | 固定子の電流の a 相、b 相、c 相 (A) |
台形の磁束変化率
永久磁石によって回転子の磁場が生成され、これにより回転子の角度に基づく台形の磁束変化率が得られます。次の図は、三相 BLDC モーターの三相の磁束変化率を示しています。

例

センサー フィードバックを使用した BLDC モーターの 6 段階整流
6 段階整流手法を使用して三相 BLDC モーターの角速度と回転方向を制御する。
端子
入力
出力
パラメーター
ヒント
モーター パラメーターをブロック パラメーターとして指定する代わりに入力端子経由で提供する場合は、BLDC HDL ブロックを使用します。
バージョン履歴
R2023a で導入