pc2dem
構文
説明
elevModel = pc2dem(ptCloudIn,gridResolution)
[___] = pc2dem(___, は、1 つ以上の名前と値の引数を使用してオプションを指定します。たとえば、Name,Value)'CornerFillMethod','min' は、関数が DEM 内のグリッド コーナーの一般化された標高値を、各グリッド コーナーの既定の探索半径内の最小標高として計算するように指定します。
例
aerialLidarData.laz ファイルに格納されている点群データを読み取るlasFileReaderオブジェクトを作成します。
fileName = fullfile(toolboxdir("lidar"),"lidardata","las", ... "aerialLidarData.laz"); lasReader = lasFileReader(fileName);
関数readPointCloudを使用して、ファイルから点群データを読み取ります。
ptCloud = readPointCloud(lasReader);
点群データを可視化します。
figure
pcshow(ptCloud.Location)
title("Point Cloud")
点群データから地面の点をセグメント化します。
groundPtsIdx = segmentGroundSMRF(ptCloud);
地面の点を抽出します。
ptCloudWithGround = select(ptCloud,groundPtsIdx);
地面の点を可視化します。
figure
pcshow(ptCloudWithGround.Location)
title("Ground Points")
セグメント化された地面の点から数値地形モデル (DTM) を作成します。
terrainModel = pc2dem(ptCloudWithGround);
DTM を可視化します。
figure
imagesc(terrainModel)
colormap(gray)
title("Digital Terrain Model")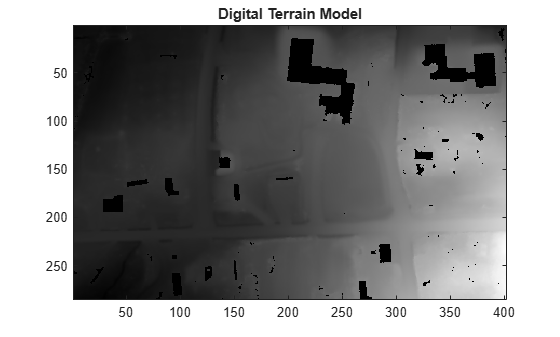
"aerialLidarData.laz" ファイルから航空点群データを読み取るlasFileReaderオブジェクトを作成します。
fileName = fullfile(toolboxdir("lidar"),"lidardata","las", ... "aerialLidarData.laz"); lasReader = lasFileReader(fileName);
関数readPointCloudを使用して、LiDAR センサーの最初に返される点群データを LAS ファイルから読み取ります。
ptCloud = readPointCloud(lasReader,"LaserReturn",1);グリッド要素分解能を 1.1 メートルとして、点群の数値表面モデル (DSM) を作成します。
gridRes = 1.1; surfaceModel = pc2dem(ptCloud,gridRes,"CornerFillMethod","max");
照明光源の位置を定義します。
azimuthAng = 135; zenithAng = 45;
関数imgradientxyを使用して DSM の方向勾配を計算します。
[gx,gy] = imgradientxy(surfaceModel,"sobel");グリッド要素分解能を使用して勾配を正規化します。
gx = gx/(8*gridRes); gy = gy/(8*gridRes);
DSM の傾きとアスペクトを計算します。
slopeAngle = atand(sqrt(gx.^2 + gy.^2)); aspectAngle = atan2d(gy,-gx); aspectAngle(aspectAngle < 0) = aspectAngle(aspectAngle < 0) + 360;
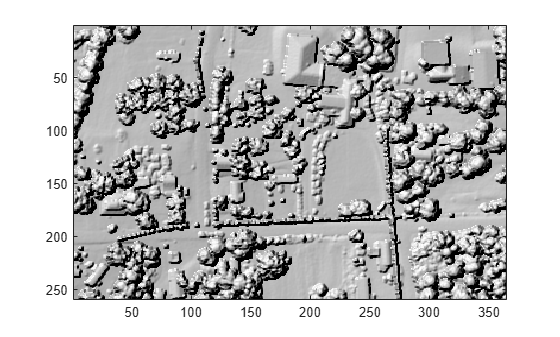
Esri® のアルゴリズムを使用して陰影起伏を計算します。陰影起伏は、イメージをシェーディングするときの照明光源の位置を考慮に入れて、表面を 3 次元のグレースケールで表現したものです。
h = 255.0*((cosd(zenithAng).*cosd(slopeAngle)) ...
+ (sind(zenithAng).*sind(slopeAngle).*cosd(azimuthAng - aspectAngle)));
h(h < 0) = 0;DSM の陰影起伏を可視化します。
figure imagesc(h) colormap(gray)
入力引数
名前と値の引数
出力引数
アルゴリズム
関数は、ローカルのビン化アルゴリズムを使用して点群データの数値標高モデル (DEM) を作成します。アルゴリズムでは、点の標高が z 軸に沿っていると仮定します。
ローカルのビン化アルゴリズム:
点群を xy- 次元 (鳥瞰ビュー) に沿ってグリッドに分割します。
gridResolution引数を使用してグリッドの次元を指定します。各グリッド コーナー周辺の円形領域内にあるすべての点の標高情報を利用して、一般化されたグリッドの値を計算します。
'SearchRadius'および'CornerFillMethod'の名前と値の引数をそれぞれ使用して、探索半径と計算法を指定できます。円形領域内に点がない場合、アルゴリズムは値を計算せず、それらのグリッド コーナーは塗りつぶされないままとなります。関数では、それらを
NaNとして表現します。アルゴリズムは、逆距離加重 (IDW) 内挿を使用して、塗りつぶされていないグリッド コーナーを塗りつぶします。IDW 内挿法のフィルター サイズを指定するには、'FilterSize'の名前と値の引数を使用します。