imregdemons
2 つの 2 次元イメージまたは 3 次元イメージを位置合わせさせる変位場の推定
構文
説明
[ はレジストレーションされるイメージ D,moving_reg] = imregdemons(moving,fixed)moving を参照イメージ fixed と位置合わせする変位場 D を推定します。各ピクセル位置の変位ベクトルは、fixed イメージ グリッドの位置を moving イメージの対応する位置にマッピングします。moving_reg は、moving イメージを変位場 D に従ってワーピングし、線形内挿によってリサンプルしたバージョンです。
[ は計算の反復回数を指定します。この関数は収束基準を使用しないため、指定または既定の回数反復されることが常に保証されます。 D,moving_reg] = imregdemons(moving,fixed,N)
[ は、名前と値の引数を使用して重み計算の特性を制御し、移動イメージをレジストレーションします。D,moving_reg] = imregdemons(___,Name=Value)
例
この例では、同じ手が 2 つの異なるポーズで撮影されている場合のレジストレーション問題を解決する方法を説明します。イメージ間の位置ずれは、それぞれのイメージの各所で異なります。したがって、非剛体レジストレーション問題です。
2 つのイメージをワークスペースに読み取ります。
fixed = imread('hands1.jpg'); moving = imread('hands2.jpg');
イメージを処理するためにグレースケールに変換します。
fixed = im2gray(fixed); moving = im2gray(moving);
初期の位置ずれを観察します。指のポーズが異なっています。
imshowpair(fixed,moving,'montage')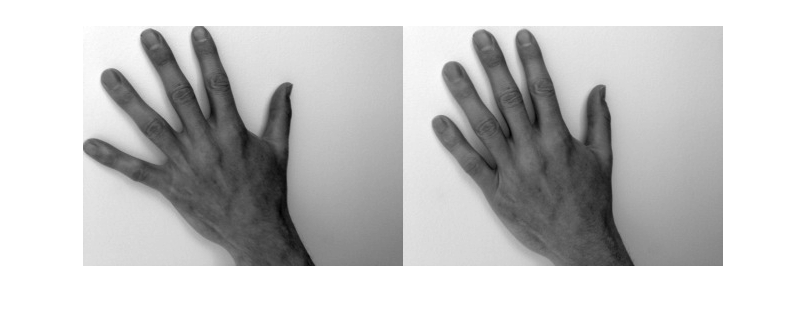
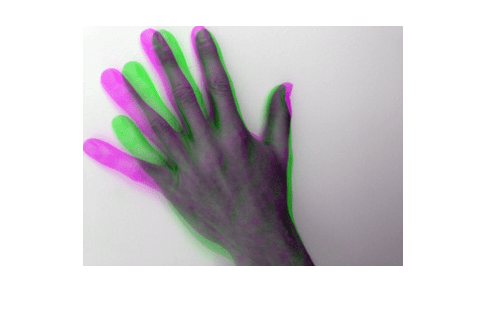
イメージの相違点がわかりやすいように 2 つのイメージを重ね合わせます。相違点が緑とマゼンタで強調表示されています。
imshowpair(fixed,moving)
ヒストグラム マッチングを使用して、moving イメージと fixed イメージの照度差を補正します。これは一般的な前処理手順です。
moving = imhistmatch(moving,fixed);
2 つのイメージの位置合わせに必要な変換を推定します。
[~,movingReg] = imregdemons(moving,fixed,[500 400 200],... 'AccumulatedFieldSmoothing',1.3);
レジストレーションの結果を表示します。下の最初の図では、位置合わせを示すために 2 つのイメージが重ね合わされています。
imshowpair(fixed,movingReg)

imshowpair(fixed,movingReg,'montage')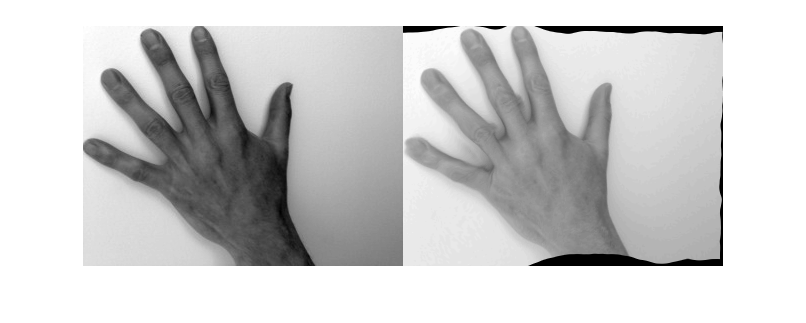
入力引数
名前と値の引数
出力引数
参照
[1] Thirion, J.-P. "Image matching as a diffusion process: an analogy with Maxwell’s demons". Medical Image Analysis. Vol. 2, Number 3, 1998, pp. 243–260.
[2] Vercauteren, T., X. Pennec, A. Perchant, N. Ayache, "Diffeomorphic Demons: Efficient Non-parametric Image Registration", NeuroImage. Vol. 45, Number 1, Supplement 1, March 2009, pp. 61–72.
拡張機能
バージョン履歴
R2014b で導入参考
アプリ
関数
imregcorr|imregister|imregtform|imshowpair|imwarp|imregdeform(Medical Imaging Toolbox) |imreggroupwise(Medical Imaging Toolbox)