RespConfig
説明
RespConfig オブジェクトは、ステップ応答 (step、stepplot)、インパルス応答 (impulse、impulseplot)、および初期応答 (initial (Control System Toolbox)、initialplot (Control System Toolbox)) のプロット オプションを指定するために使用します。
ステップ応答では、次のように構成が適用されます。
SISO の場合
MIMO の場合、次のように設定することで j 番目の入力チャネルのステップ応答が取得されます。
ここで、ej は j 番目の基底ベクトルです。
インパルス応答では、次のように構成が適用されます。
ここで、以下となります。
U はベースライン入力値です。
dU は、入力レベルの U からの相対的な変化です。
T0 は、開始時間です。
Td は、変化が発生するまでの T0 からの相対的な時間です。
作成
説明
respOpt = RespConfig
respOpt = RespConfig(PropertyName=Value)
プロパティ
オブジェクト関数
impulse | 動的システムのインパルス応答プロット、インパルス応答データ |
impulseplot | インパルス応答をプロットし、プロット ハンドルを返す |
step | 動的システムのステップ応答 |
stepplot | ステップ応答をプロットし、プロット ハンドルを返す |
例
伝達関数モデルを作成します。
sys = tf([1 5],[1 10 50]);
オプション セットを作成して、ステップの入力バイアス、振幅、および遅延を指定します。
Config = RespConfig(Bias=-2,Amplitude=5,Delay=2);
指定したオプションを使用してステップ応答を計算します。
step(sys,Config)

状態空間モデルを作成します。
A = [-0.8429,-0.2134;-0.5162,-1.2139]; B = [0.7254,0.7147;0,-0.2050]; C = [-0.1241,1.4090;1.4897,1.4172]; D = [0.6715,0.7172;-1.2075,0]; sys = ss(A,B,C,D);
既定のオプション セットを作成し、ドット表記を使用して値を指定します。
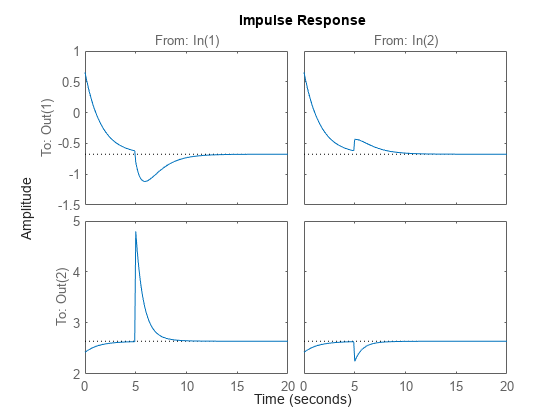
respOpt = RespConfig; respOpt.Bias = [-2,3]; respOpt.Amplitude = [2,-0.5]; respOpt.InitialState = [0.1,-0.1]; respOpt.Delay = 5;
インパルス応答を計算します。
t = 0:0.1:20; impulse(sys,t,respOpt)
バージョン履歴
R2023a で導入参考
impulse | impulseplot | step | stepplot