このページは前リリースの情報です。該当の英語のページはこのリリースで削除されています。
Harris のコーナー検出アルゴリズムの HDL コード生成
この例では、Harris の手法を使用してコーナー メトリクスを計算する MATLAB® 設計からの HDL コードの生成方法を示します。
コーナー検出アルゴリズム
コーナーは、イメージの 2 つのエッジが交差するイメージ内のポイントです。コーナーは、イメージの回転、並進、発光に対してロバストです。コーナーには、イメージ情報の復元、イメージのレジストレーション、オブジェクトの追跡など、さまざまな用途に使用できる重要な特徴があります。
コーナー検出アルゴリズムは、コーナー メトリクスを使用してコーナーを識別します。このメトリクスは、特定のオブジェクトのコーナーにあるピクセルの尤度に対応します。コーナー メトリクスのピークでコーナーが識別されます。Computer Vision Toolbox のドキュメントのCorner Detection (Computer Vision Toolbox)も参照してください。コーナー検出アルゴリズムは次のように動作します。
1. 入力イメージを読み取ります。
Image_in = checkerboard(10);
2. コーナーを検出します。
cornerDetector = detectHarrisFeatures(Image_in);
3. 結果を表示します。
[~,metric] = step(cornerDetector,image_in); figure; subplot(1,2,1); imshow(image_in); title('Original'); subplot(1,2,2); imshow(imadjust(metric)); title('Corner metric');
コーナー検出 MATLAB 設計
design_name = 'mlhdlc_corner_detection'; testbench_name = 'mlhdlc_corner_detection_tb';
MATLAB 設計を確認します。
edit(design_name);
%#codegen function [valid, ed, xfo, yfo, cm] = mlhdlc_corner_detection(data_in) % Copyright 2011-2022 The MathWorks, Inc. [~, ed, xfo, yfo] = mlhdlc_sobel(data_in); cm = compute_corner_metric(xfo, yfo); % compute valid signal persistent cnt if isempty(cnt) cnt = 0; end cnt = cnt + 1; valid = cnt > 3*80+3 && cnt <= 80*80+3*80+3; end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function bm = compute_corner_metric(gh, gv) cmh = make_buffer_matrix_gh(gh); cmv = make_buffer_matrix_gv(gv); bm = compute_harris_metric(cmh, cmv); end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function bm = make_buffer_matrix_gh(gh) persistent b1 b2 b3 b4; if isempty(b1) b1 = dsp.Delay('Length', 80); b2 = dsp.Delay('Length', 80); b3 = dsp.Delay('Length', 80); b4 = dsp.Delay('Length', 80); end b1p = step(b1, gh); b2p = step(b2, b1p); b3p = step(b3, b2p); b4p = step(b4, b3p); cc = [b4p b3p b2p b1p gh]; persistent h1 h2 h3 h4; if isempty(h1) h1 = dsp.Delay(); h2 = dsp.Delay(); h3 = dsp.Delay(); h4 = dsp.Delay(); end h1p = step(h1, cc); h2p = step(h2, h1p); h3p = step(h3, h2p); h4p = step(h4, h3p); bm = [h4p h3p h2p h1p cc]; end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function bm = make_buffer_matrix_gv(gv) persistent b1 b2 b3 b4; if isempty(b1) b1 = dsp.Delay('Length', 80); b2 = dsp.Delay('Length', 80); b3 = dsp.Delay('Length', 80); b4 = dsp.Delay('Length', 80); end b1p = step(b1, gv); b2p = step(b2, b1p); b3p = step(b3, b2p); b4p = step(b4, b3p); cc = [b4p b3p b2p b1p gv]; persistent h1 h2 h3 h4; if isempty(h1) h1 = dsp.Delay(); h2 = dsp.Delay(); h3 = dsp.Delay(); h4 = dsp.Delay(); end h1p = step(h1, cc); h2p = step(h2, h1p); h3p = step(h3, h2p); h4p = step(h4, h3p); bm = [h4p h3p h2p h1p cc]; end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function cm = compute_harris_metric(gh, gv) [g1, g2, g3] = gaussian_filter(gh, gv); [s1, s2, s3] = reduce_matrix(g1, g2, g3); cm = (((s1*s3) - (s2*s2)) - (((s1+s3) * (s1+s3)) * 0.04)); end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function [g1, g2, g3] = gaussian_filter(gh, gv) %g=fspecial('gaussian',[5 5],1.5); g = [0.0144 0.0281 0.0351 0.0281 0.0144 0.0281 0.0547 0.0683 0.0547 0.0281 0.0351 0.0683 0.0853 0.0683 0.0351 0.0281 0.0547 0.0683 0.0547 0.0281 0.0144 0.0281 0.0351 0.0281 0.0144]; g1 = (gh .* gh) .* g(:)'; g2 = (gh .* gv) .* g(:)'; g3 = (gv .* gv) .* g(:)'; end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function [s1, s2, s3] = reduce_matrix(g1, g2, g3) s1 = sum(g1); s2 = sum(g2); s3 = sum(g3); end
MATLAB 関数はモジュール化されていて、いくつかの関数を使用してイメージのコーナーを計算します。関数は次のとおりです。
compute_corner_metricは、関数compute_harris_metricをインスタンス化してコーナー メトリクス行列を計算します。compute_harris_metricは、関数gaussian_filterとreduce_matrixをインスタンス化して入力イメージのコーナーの特徴を検出します。make_buffer_matrix_ghおよびmake_buffer_matrix_gvの出力を入力として受け取ります。
コーナー検出 MATLAB テスト ベンチ
MATLAB テスト ベンチを確認します。
edit(testbench_name);
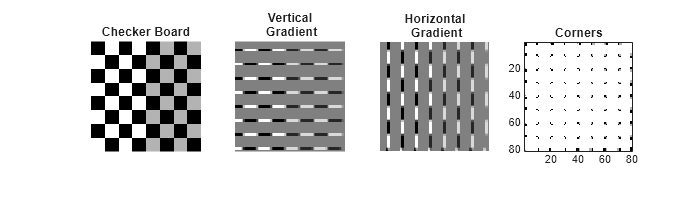
clear mlhdlc_corner_detection; clear mlhdlc_sobel; % Copyright 2011-2022 The MathWorks, Inc. image_in = checkerboard(10); [image_height, image_width] = size(image_in); % Pre-allocating y for simulation performance y_cm = zeros(image_height, image_width); y_ed = zeros(image_height, image_width); gradient_hori = zeros(image_height,image_width); gradient_vert = zeros(image_height,image_width); dataValidOut = y_cm; idx_in = 1; idx_out = 1; for i=1:image_width+3 for j=1:image_height+3 if idx_in <= image_width * image_height u = image_in(idx_in); else u = 0; end idx_in = idx_in + 1; [valid, ed, gh, gv, cm] = mlhdlc_corner_detection(u); if valid y_cm(idx_out) = cm; y_ed(idx_out) = ed; gradient_hori(idx_out) = gh; gradient_vert(idx_out) = gv; idx_out = idx_out + 1; end end end padImage = y_cm; % Assuming 'padImage' is the image you're working with thresholdValue = 0.0005; % Adjust the threshold according to your needs % Apply threshold thresholdedImage = padImage > thresholdValue; % Now find local maxima on the thresholded image localMaximaMask = imregionalmax(thresholdedImage,8); % Extract the coordinates of the local maxima [row, col] = find(localMaximaMask); % Prepare Corners matrix for visualization Corners = [col, row]; % Combine X and Y coordinates into a Nx2 matrix Corners_int32 = int32(Corners); % Visualize corners on the original image ImageCornersMarked = insertMarker(image_in, Corners_int32, 'o', 'Size', 5, 'Color', 'white'); % Display results nplots = 4; scrsz = get(0,'ScreenSize'); figure('Name', [mfilename, '_plot'], 'Position',[1 300 700 200]) subplot(1,nplots,1); imshow(image_in,[min(image_in(:)) max(image_in(:))]); title('Checker Board') axis square subplot(1,nplots,2); imshow(gradient_hori(3:end,3:end),[min(gradient_hori(:)) max(gradient_hori(:))]); title(['Vertical',newline,' Gradient']) axis square subplot(1,nplots,3); imshow(gradient_vert(3:end,3:end),[min(gradient_vert(:)) max(gradient_vert(:))]); title(['Horizontal',newline,' Gradient']) axis square subplot(1,nplots,4); imagesc(ImageCornersMarked); % Use imagesc for displaying the image with markers title('Corners'); axis square
MATLAB アルゴリズムのテスト
実行時エラーを避けるために、テスト ベンチを使用して設計をシミュレートします。
mlhdlc_corner_detection_tb
HDL Coder™ プロジェクトの作成
1. HDL Coder プロジェクトを作成します。
coder -hdlcoder -new mlhdlc_corner_detect_prj
2. mlhdlc_corner_detection.m ファイルを [MATLAB 関数] としてプロジェクトに追加し、mlhdlc_corner_detection_tb.m を [MATLAB テスト ベンチ] として追加します。
3. [型の自動定義] をクリックして MATLAB 関数 mlhdlc_corner_detection.m の入力と出力の推奨される型を使用します。

MATLAB HDL Coder プロジェクトの作成と入力に関する詳細なチュートリアルについては、MATLAB から HDL へのワークフロー入門を参照してください。
固定小数点変換と HDL コード生成の実行
[ワークフロー アドバイザー] ボタンをクリックして、ワークフロー アドバイザーを開始します。
[HDL コード生成] タスクを右クリックして [選択したタスクまで実行] を選択します。
単一の HDL ファイル mlhdlc_corner_detection_fixpt.vhd が MATLAB 設計に対して生成されます。フィルター設計に対する生成された HDL コードを確認するには、コード生成ログのウィンドウでハイパーリンクをクリックします。
MATLAB 設計の関数ごとに HDL ファイルを生成する場合は、[HDL コード生成] タスクの [詳細設定] タブで [関数に対してインスタンス化可能なコードを生成] チェック ボックスを選択します。関数のインスタンス化可能なコードの生成も参照してください。