trackFuser
Single-hypothesis track-to-track fuser
Description
The trackFuser
System object™ fuses tracks generated by tracking sensors or trackers and allows you to get
fused tracks from decentralized tracking systems. trackFuser uses the global
nearest neighbor (GNN) algorithm to maintain a single hypothesis about the objects it tracks.
The input tracks are called source or local
tracks, and the output tracks are called central tracks.
To fuse tracks using this object:
Create the
trackFuserobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
fuser = trackFuser
fuser = trackFuser(Name,Value)
Properties
Usage
Syntax
Description
confirmedTracks = fuser(localTracks,tFusion)tFusion.
[
also returns a list of tentative tracks, a list of all tracks, and the analysis
information.confirmedTracks,tentativeTracks,allTracks,analysisInformation] = fuser(localTracks,tFusion)
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Define two tracking sources: one internal and one external. The SourceIndex of each source must be unique.
internalSource = fuserSourceConfiguration(1,'IsInternalSource',true); externalSource = fuserSourceConfiguration(2,'IsInternalSource',false);
Create a trackFuser with FuserIndex equal to 3. The fuser takes the two sources defined above and uses the 'Cross' StateFusion model.
fuser = trackFuser('FuserIndex',3, 'MaxNumSources',2, ... 'SourceConfigurations',{internalSource;externalSource}, ... 'StateFusion','Cross');
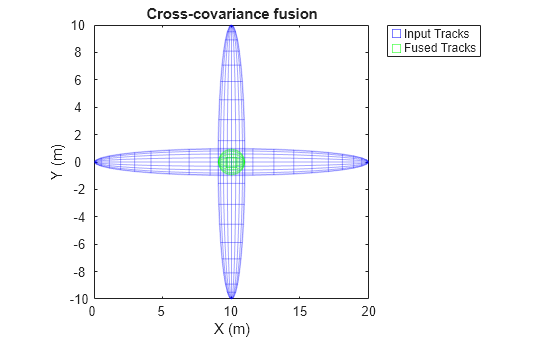
Update the fuser with two tracks from the two sources. Use a 3-D constant velocity state, in which the states are given in the order of [x; vx; y; vy; z; vz]. The states of the two tracks are the same, but their covariances are different. For the first track, create a large covariance in the *x-*axis. For the second track, create a large covariance in the *y-*axis.
tracks = [objectTrack('SourceIndex',1,'State',[10;0;0;0;0;0], ... 'StateCovariance',diag([100,1000,1,10,1,10])); ... objectTrack('SourceIndex',2,'State',[10;0;0;0;0;0], ... 'StateCovariance',diag([1,10,100,1000,1,10]))];
Fuse the track with fusion time equal to 0.
time = 0; confirmedTracks = fuser(tracks,time);
Obtain the positions and position covariances of the source tracks and confirmed tracks.
positionSelector = [1 0 0 0 0 0; 0 0 1 0 0 0; 0 0 0 0 1 0]; % [x; y; z]
[inputPos,inputCov] = getTrackPositions(tracks,positionSelector);
[outputPos,outputCov] = getTrackPositions(confirmedTracks,positionSelector);Visualize the results using trackPlotter.
tPlotter = theaterPlot('XLim',[0, 20],'YLim',[-10, 10],'ZLim',[-10, 10]); tPlotter1 = trackPlotter(tPlotter,'DisplayName','Input Tracks','MarkerEdgeColor','blue'); tPlotter2 = trackPlotter(tPlotter,'DisplayName','Fused Tracks','MarkerEdgeColor','green'); plotTrack(tPlotter1,inputPos,inputCov) plotTrack(tPlotter2,outputPos,outputCov) title('Cross-covariance fusion')
References
[1] Blackman, S. and Popoli, R., 1999. Design and analysis of modern tracking systems(Book). Norwood, MA: Artech House, 1999.
[2] Chong, Chee-Yee, Shozo Mori, William H. Barker, and Kuo-Chu Chang. "Architectures and algorithms for track association and fusion." IEEE Aerospace and Electronic Systems Magazine 15, no. 1 (2000): 5-13.
[3] Tian, Xin, Yaakov Bar-Shalom, D. Choukroun, Y. Oshman, J. Thienel, and M. Idan. "Track-to-Track Fusion Architectures-A Review." In book “Advances in Estimation, Navigation, and Spacecraft Control”. Springer, 2015.
Extended Capabilities
Version History
Introduced in R2019b
See Also
Functions
assignmunkres|assignauction|assignjv|fusecovint|fusexcov|constvel|constacc|singer|singerjac|constturn|ctrv