外部コードの統合の例
このトピックでは、外部コードの統合のさまざまなシナリオについて説明します。
S-Function を使用した外部 C++ コードのモデルへの統合
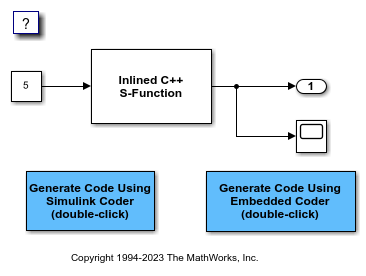
この例は、S-Function を使用して C++ コードをモデルに統合する方法を示しています。
モデル例を開く
モデル例 CppSFunctionExternalCode を開きます。
open_system('CppSFunctionExternalCode');
C++ コンパイラの設定
1. MATLAB® コマンド ウィンドウで、次のコマンドを入力します。
mex -setup
2. プロンプトが表示されたら、開発用コンピューターにインストールされている C++ コンパイラを選択します。
C++ コードの統合
S-Function を使用して C++ コードをモデルに統合できます。
1. S-Function ソースを準備します。
sfun_cppcount_cpp.cppを開きます。sfun_cppcount_cpp.hを開きます。
2. Simulink Coder アプリまたは Embedded Coder アプリを開きます。
3. S-Function ソース ファイルおよびフォルダーを設定します。[モデル コンフィギュレーション パラメーター] ダイアログ ボックスを開き、[コード生成]、[カスタム コード] ペインに移動して、S-Function ソース ファイルと include フォルダーを追加します。
4. S-Function をインライン化して、生成されたコードで S-Function のオーバーヘッドを除去します。
sfun_cppcount_cpp.tlc を編集します。
C++ コード生成用のモデルの設定
モデル コンフィギュレーション パラメーター [言語] を C++ に設定します。
コードの生成とレビュー
C++ コードを生成およびレビューします。
関連するトピック
モデル コンフィギュレーション パラメーターを使用した外部 C コードの生成コードへの統合
この例では、モデル コンフィギュレーション パラメーターを使用して生成コードに外部コードを配置する方法を示します。
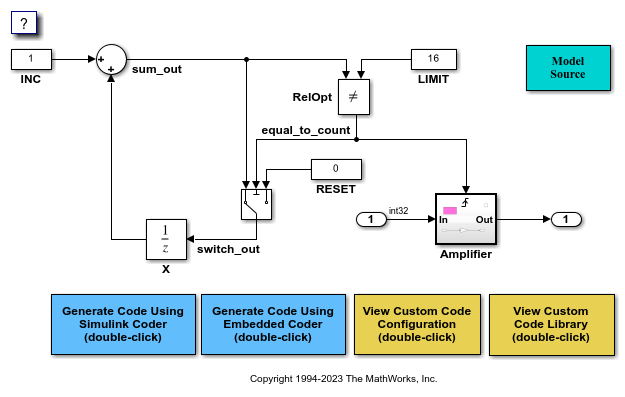
1. モデル CustomCode を開きます。
open_system('CustomCode')
2. Simulink Coder アプリまたは Embedded Coder アプリを開きます。
3. [モデル コンフィギュレーション パラメーター] ダイアログ ボックスを開いて [カスタム コード] ペインに移動します。
4. [追加のソース コード] タブで、モデル コンフィギュレーション パラメーター [追加コード] と [初期化コード] の設定を確認します。
[追加コード] にはコメントを指定し、変数
GLOBAL_INT2を -1 に設定します。[初期化コード] は変数
GLOBAL_INT2を 1 に初期化します。
5. ダイアログ ボックスを閉じます。
6. コードとコード生成レポートを生成します。
7. 生成されたソース ファイル CustomCode.c のコードを調べます。ファイルの先頭、#include ステートメントの後に、次の宣言コードがあります。
int_T GLOBAL_INT2 = -1;
次の代入がモデルの初期化エントリポイント関数に表示されます。この例では、[初期化コード] コンフィギュレーション パラメーターによるこの代入が指定されています。
GLOBAL_INT2 = 1;