検出と追跡
Automated Driving Toolbox™ の知覚アルゴリズムは、カメラおよび LiDAR スキャンからのデータを使用して、車両の状況認識を強化します。これらの知覚アルゴリズムを使用すると、対象オブジェクトを検出して追跡し、ドライビング シナリオ内でその位置を特定できます。オブジェクト検出に高度な深層学習および機械学習の手法を活用し、さらにさまざまなセンサーから得られるそれらの検出測定値を融合させて、環境内のオブジェクトを追跡できます。これらのアルゴリズムを基にして、自動ブレーキや自動ステアリングなどの自動運転アプリケーションを作成できます。
カテゴリ
- カメラ センサー構成
単眼カメラ センサーキャリブレーション、イメージ座標系から車両座標系への変換、鳥瞰ビュー イメージの変換
- オブジェクトと車線の検出
機械学習および深層学習を使用して車線境界線、歩行者、車両、その他のオブジェクトを検出
- 追跡およびセンサー フュージョン
オブジェクトの追跡とマルチセンサー フュージョン、検出およびオブジェクト追跡の鳥瞰図プロット
注目の例

Create 360° Bird's-Eye-View Image Around a Vehicle
Create a 360° bird's-eye-view image around a vehicle for use in a surround view monitoring system. It then shows how to generate code for the same bird's-eye-view image creation algorithm and verify the results.

Visual Perception Using Monocular Camera
Construct a monocular camera sensor simulation capable of lane boundary and vehicle detections.
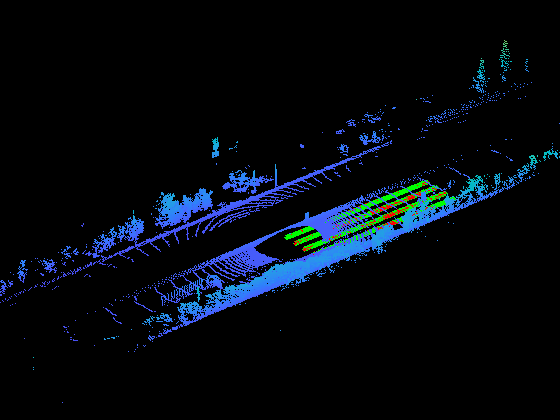
Lane Detection in Lidar Data Using Deep Learning
Detect lanes in lidar point clouds using LLDN-GFC deep learning network.

深層学習車両検出器の学習
深層学習を使用して視覚ベースの車両検出器に学習させる

Extended Object Tracking of Highway Vehicles with Radar and Camera
Track objects whose dimensions span multiple sensor resolution cells.

Track-to-Track Fusion for Automotive Safety Applications
Fuse tracks from two vehicles to provide a more comprehensive estimate of the environment than seen by each vehicle.
Grid-Based Tracking in Urban Environments Using Multiple Lidars
Track moving objects by using multiple lidar sensors and a grid-based tracker.
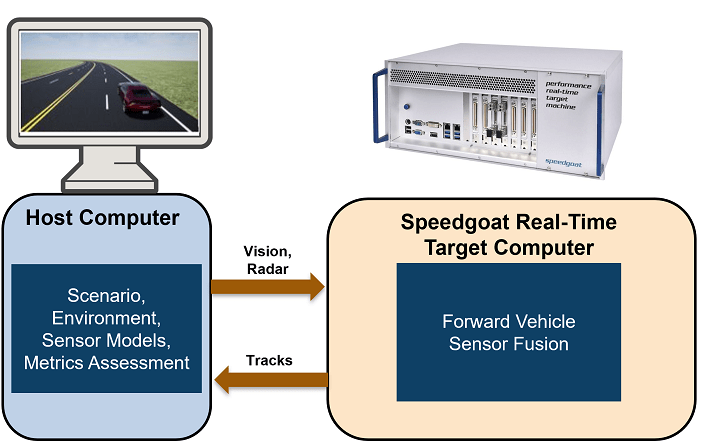
Automate Real-Time Testing for Forward Vehicle Sensor Fusion
Deploy and test forward vehicle sensor fusion component of highway lane following system in real-time.

LiDAR を使用した地面および障害物の検出
3 次元 LiDAR データで地面を検出し、近くの障害物を検出します。
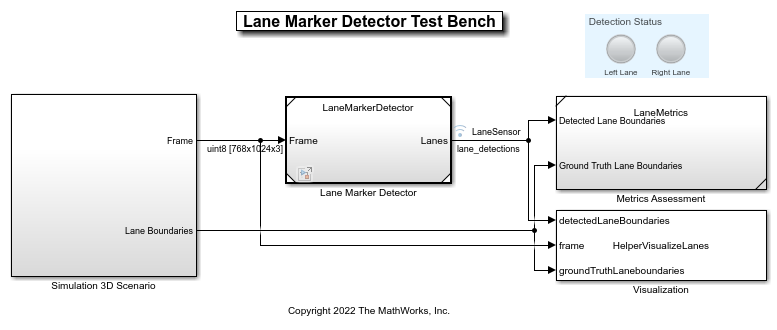
Generate Code for Lane Marker Detector
Generate C++ code for lane marker detector and validate the functional equivalence using software-in-the-loop (SIL) simulation.
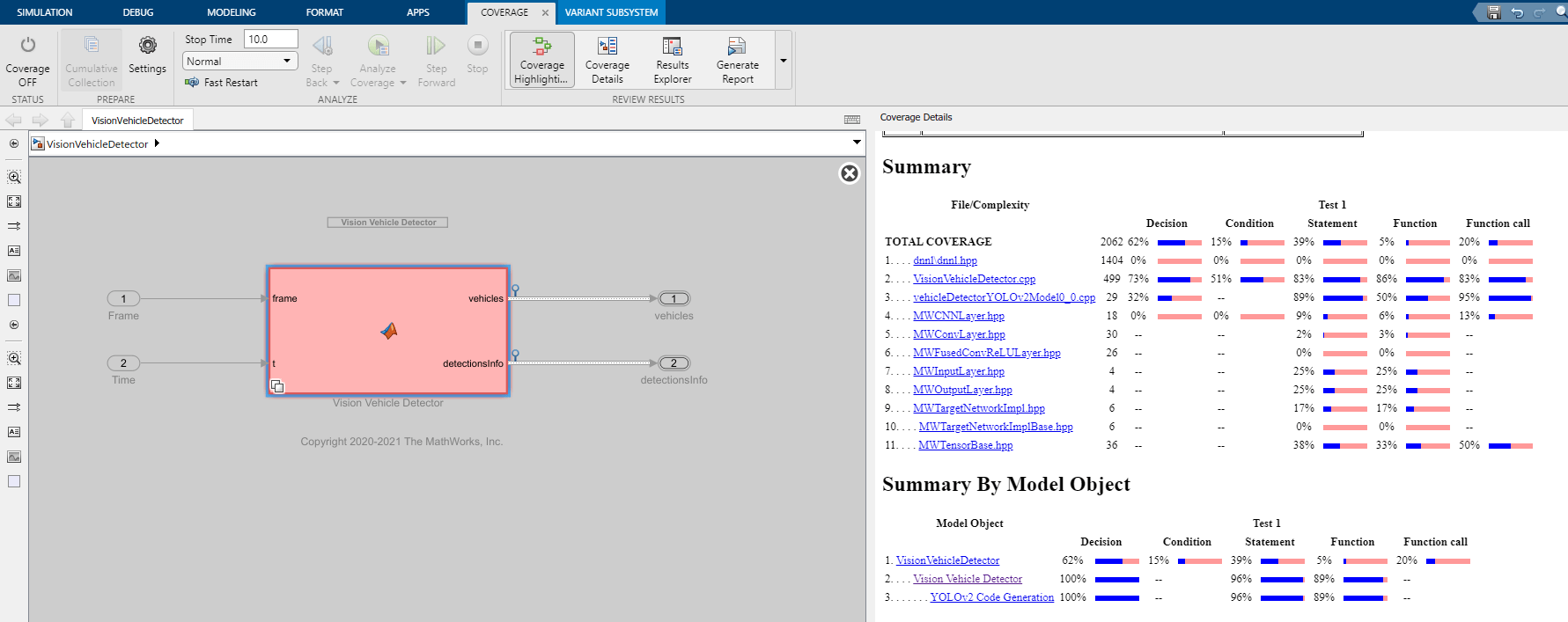
Automate Testing for Vision Vehicle Detector
Automate the testing of a vehicle detector and generated code.