通信遅延での受動制御
この例では、受動制御システムで通信遅延を緩和する方法について説明します。
受動性ベースの制御
受動性定理により、2 つの厳密に受動的なシステム  および
および  の負のフィードバック相互接続は常に安定します。
の負のフィードバック相互接続は常に安定します。

物理プラントが受動である場合は、ロバスト性と安全性の理由から受動コントローラーを使用した方が有利です。ただし、ネットワーク化された制御システムでは、通信遅延によって受動性ベースの制御の利点が打ち消され、不安定になる可能性があります。この点を説明するために、「柔軟ビームの振動制御」の例で取り上げたプラントと 2 次受動コントローラーを使用します。基になる制御の問題の背景についてはこの例を参照してください。プラント モデル  と受動コントローラー
と受動コントローラー  ( は他の例の
( は他の例の  に対応) を読み込みます。
に対応) を読み込みます。
load BeamControl G C bode(G,C,{1e-2,1e4}) legend('G','C')

制御構成と、 から
から  へのインパルス応答を以下に示します。
へのインパルス応答を以下に示します。

impulse(feedback(G,C))

通信遅延の不安定化の影響
ここでは、センサーとコントローラーの間およびコントローラーとアクチュエータの間に相当の通信遅延があることを前提にします。この状況は、Simulink® で次のようにモデル化されます。
open_system('DelayedFeedback')

通信遅延は次のように設定されます。
T1 = 1; T2 = 2;
このモデルをシミュレーションすると、通信遅延によってフィードバック ループが不安定になることがわかります。

散乱変換
遅延の影響を緩和するためには、ネットワーク上でプラントとコントローラー間で交換される信号の単純な線形変換を使用します。
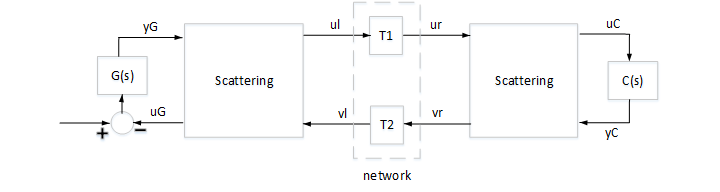
図 1: ネットワーク化された制御システム
これは、"散乱変換" と呼ばれ、次の式によって求められます。

これは、次の関数と等価です。

ここで、 です。遅延がない場合、2 つの散乱変換は相殺し合い、図 1 のブロック線図は、 および の負のフィードバック相互接続と等価になることに注意してください。
です。遅延がない場合、2 つの散乱変換は相殺し合い、図 1 のブロック線図は、 および の負のフィードバック相互接続と等価になることに注意してください。
ただし、遅延がある場合、 は
は  と同等ではなくなり、この散乱変換によって閉ループ システムのプロパティが変わります。実際、次であること、
と同等ではなくなり、この散乱変換によって閉ループ システムのプロパティが変わります。実際、次であること、

および  と
と  の厳密な受動性が確認されると、次のようになります。
の厳密な受動性が確認されると、次のようになります。

スモール ゲイン定理により、遅延がどれだけ大きくても図 1 のフィードバック相互接続は常に安定することが保証されます。これを確認するには、値  に対して図 1 のブロック線図の Simulink モデルを作成します。
に対して図 1 のブロック線図の Simulink モデルを作成します。
b = 1;
open_system('ScatteringTransformation')

以前実行したように閉ループ システムのインパルス応答をシミュレートします。応答は安定し、大きな遅延がありながらも遅延のない応答と同様になりました。

散乱変換の詳細については、T. Matiakis、S. Hirche および M. Buss 著の「Independent-of-Delay Stability of Nonlinear Networked Control Systems by Scattering Transformation」 (『Proceedings of the 2006 American Control Conference』 (2006 年) p 2801 ~ 2806) を参照してください。