受動システムの並列相互接続
この例では、受動システムの並列相互接続のプロパティについて説明します。
受動システムの並列相互接続
2 つのサブシステム と の並列の相互接続について考えます。相互接続されたシステム は入力 を出力 にマッピングします。
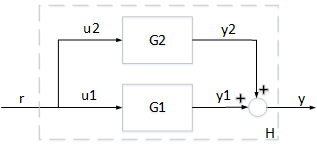
システム と がともに受動的である場合、相互接続されたシステム は受動的となることが保証されます。以下に例を示します。
.
両方のシステムは受動的です。
G1 = tf([0.1,1],[1,2]); isPassive(G1)
ans = logical
1
G2 = tf([1,2,1],[1,3,10]); isPassive(G2)
ans = logical
1
このため、これらの並列相互接続 は、次で確認されるとおりに受動的であると予測できます。
H = parallel(G1,G2); isPassive(H)
ans = logical
1
並列相互接続の受動性インデックス
と の受動性インデックスと、相互接続されたシステム の受動性インデックスとの間には関係性があります。 と で と の入力受動性インデックスを表し、 と で出力受動性インデックスを表します。すべてのインデックスが非負の場合、並列相互接続 の入力受動性インデックス と出力受動性インデックス は次を満たします。
つまり、 と の入出力受動性インデックスから、並列接続 の最小レベルの入出力受動性を一部推測できます。詳細については、Yu, H. による論文 "Passivity and dissipativity as design and analysis tools for networked control systems," Chapter 2, PhD Thesis, University of Notre Dame, 2012. を参照してください。入力受動性インデックス の下限を確認します。
% Input passivity index for G1 nu1 = getPassiveIndex(G1,'input'); % Input passivity index for G2 nu2 = getPassiveIndex(G2,'input'); % Input passivity index for H nu = getPassiveIndex(H,'input')
nu = 0.3777
% Lower bound
nu1+nu2ans = 0.1474
同様に、 の出力受動性インデックスの下限を確認します。
% Output passivity index for G1 rho1 = getPassiveIndex(G1,'output'); % Output passivity index for G2 rho2 = getPassiveIndex(G2,'output'); % Output passivity index for H rho = getPassiveIndex(H,'output')
rho = 0.6443
% Lower bound
rho1*rho2/(rho1+rho2)ans = 0.2098