allmargin
ゲイン余裕、位相余裕、遅延余裕、および交差周波数
説明
S = allmargin(L,Focus=[fmin,fmax])fmin,fmax] におけるゲイン余裕と位相余裕を計算します。この範囲外の安定性の問題は無視されます。この構文は、たとえば、安定余裕を計算するために周波数が非常に低いダイナミクスを無視する場合に使用します。 (R2024a 以降)
例
入力引数
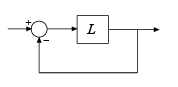
開ループ応答。動的システム モデルとして指定します。L は、入力数と出力数が同じであれば SISO または MIMO にできます。allmargin は、負のフィードバックの閉ループ システム feedback(L,eye(M)) の従来の安定余裕を計算します。
正のフィードバック システム feedback(L,eye(M),+1) の安定余裕を計算するには、allmargin(-L) を使用します。
コントローラー P とプラント C がある場合、プラントの入力または出力におけるゲインと位相の変動についての安定余裕を計算できます。次のブロック線図について考えます。
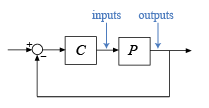
プラント出力における余裕を計算するには、
L = P*Cと設定します。プラント入力における余裕を計算するには、
L = C*Pと設定します。
L は連続時間または離散時間にできます。L が一般化状態空間モデル (genss または uss) の場合、allmargin は L 内のすべての制御設計ブロックの現在の値またはノミナル値を使用します。
L が周波数応答データ モデル (frd など) の場合、allmargin はモデルで表現される各周波数における余裕を計算します。この関数は、最小の安定余裕をもつ周波数の余裕を返します。
L がモデル配列の場合、allmargin は配列内の各モデルの余裕を計算します。
R2024a 以降
安定性解析で考慮する周波数範囲。範囲の下限と上限を含む 2 要素ベクトルとして指定します。この範囲外のダイナミクスは余裕の計算で無視されます。周波数は rad/TimeUnit で指定します。ここで、TimeUnit は入力動的システムの TimeUnit プロパティです。
例: [1e-3,1e6]
絶対単位でのシステム応答の振幅。3 次元配列として指定します。mag は M x M x N の配列で、M が入力または出力の数、N が周波数点の数です。mag の取得の詳細については、振幅と位相のデータの取得およびMIMO システムの振幅と位相を参照してください。
度単位でのシステム応答の位相。3 次元配列として指定します。phase は M x M x N の配列で、M が入力または出力の数、N が周波数点の数です。phase の取得の詳細については、振幅と位相のデータの取得およびMIMO システムの振幅と位相を参照してください。
システム応答の振幅値と位相値が取得される周波数。列ベクトルとして指定します。周波数ベクトル w には任意の単位を指定できます。allmargin は周波数を同じ単位で返します。正確な安定余裕を近似するために、周波数点間で allmargin による内挿が行われます。
サンプル時間。整数として指定します。allmargin は ts を使用して周波数応答データから安定余裕を見つけます。
連続時間モデルの場合、
ts = 0と設定します。離散時間モデルの場合、
tsはサンプリング周期を表す正の整数です。指定のないサンプル時間を伴う離散時間モデルを示すには、ts = -1と設定します。
出力引数
ヒント
allmarginは、開ループ応答Lをもつシステムが負のフィードバック システムであると仮定します。正のフィードバック システムfeedback(L,eye(M),+1)の従来の安定余裕を計算するには、allmargin(-L)を使用します。Simulink® でモデル化されたシステムの従来の余裕を計算するには、まずモデルを線形化して、特定の操作点における開ループ応答を取得します。その後、
allmarginを使用して、線形化されたシステムの従来の安定余裕を計算します。詳細については、Stability Margins of a Simulink Model (Robust Control Toolbox)を参照してください。Robust Control Toolbox™ ソフトウェアがある場合、フィードバック ループの安定性が維持される "安全" なゲインと位相の変動の範囲を定義するディスクベースの余裕を
diskmargin(Robust Control Toolbox) を使用して計算できます。
バージョン履歴
R2006a より前に導入参考
線形システム アナライザー | margin | diskmargin (Robust Control Toolbox)
トピック
- Stability Margins of a Simulink Model (Robust Control Toolbox)