防衛通信: US MIL-STD-188-110A 受信機
このモデルでは、U. S. MIL-STD-188-110A 軍用規格に準拠する通信システムについて示します。特に、指令送信機で変調され、データ収集装置で取得されるテキスト メッセージを復調して出力する完全な受信機を実装します。このモデルは、1200 bps のデータ転送速度をサポートします。また、0.6 秒のインターリーバー長も実装します。
この規格で説明されているシステムは、HF (高周波数) チャネル上の長距離戦術通信用です。このシステムは、NATO 規格 STANAG 4539 と互換性があります。
例の構造

この例は以下の項目で構成され、下記の節で詳細に説明されています。
Acquired Passband Waveform - 1800 Hz を中心とするバンドパス MIL-STD-188-110A 波形を出力します。
Frequency Translator and Channel - 信号を複素ベースバンドにダウンコンバートし、選択したチャネルで処理します。
Receiver - 同期およびベースバンド処理を実行し、テキスト メッセージを出力します。
Acquired Passband Waveform
Acquired Passband Waveform サブシステムは、出力としてストリームする MATLAB® ワークスペース変数を使用します。この変数は、規格準拠の送信機によって生成され、データ収集装置によって取得されたデータを表します。A/D の定格サンプル レートは 9600 sps ですが、実際の A/D サンプル レートは、この値からわずかに補正され、シンボル タイミング周波数オフセットになります。
Frequency Translator and Channel
このサブシステムは、複素ベースバンドへの理想的なダウンコンバージョンを実行し、4 つの連続的な劣化チャネルのいずれかを使用して入力信号を処理します。
ノイズのないチャネル
AWGN チャネル
静的周波数選択性チャネルおよび AWGN
フェージング周波数選択性チャネルおよび AWGN
フェージング周波数選択性チャネルは、SISO Fading Channel ライブラリ ブロックによって実装されます。
複数チャネルを使用すると、受信機の性能、特にシンボル同期ブロックへの影響を調査することができます。ノイズのないチャネルは、最も効果的に受信機の操作を隔離できます。AWGN のみおよび静的周波数選択性チャネルは、性能の緩やかな劣化を示します。フェージング周波数選択性チャネルは、[2] で説明される中程度の Watterson チャネルをモデル化します。
受信機
MIL-STD-188-110A 受信機は、以下の 4 つのサブシステムで構成されます。
RRC Filter and AGC
Preamble Detect to Enable Downstream Processing
Carrier Recovery, Timing Recovery, and Equalization
Demodulation and Error Correction
RRC Filter and AGC サブシステムは、受信信号でルート レイズド コサイン フィルター処理を実行し、送信された波形用に整合フィルター処理を提供します。AGC は、イコライザーへの平均信号強度が 1 ワットであることを保証します。この操作は、イコライザー入力信号の配置が、シンボル判定を実行する理想的なコンスタレーションによく一致することを保証します。
Preamble Detect to Enable Downstream Processing サブシステムは、3 つの仮想上同一である 0.2 秒のデータ セグメントで構成される、既知の 0.6 秒同期プリアンブルで相関を実行します。プリアンブル検出を宣言するために、3 つの連続する相関頂点を 0.2 秒、0.4 秒、および 0.6 秒で検出します。プリアンブルが検出されると、サブシステムは制御信号を送信して、搬送波再生、タイミング復元、イコライズ、復調、および誤り訂正のようなダウンストリーム処理が有効になります。以下に示す Stateflow® ステート マシンを使用して、3 つの連続頂点が検出されます。ブロック線図は、プリアンブル相関器との関係からステート マシンを示します。ステート マシンは、ブロック線図の下になります。

Carrier Recovery, Timing Recovery, and Equalization サブシステムは、切り替え可能な NCO を使用して補正正弦波を生成し、比較的一定の搬送波周波数オフセットを削除します。NCO 制御信号は、RLS イコライザーの出力と入力の位相誤差を推定することにより生成されます。RLS イコライザーはDecision Feedback Equalizerライブラリ ブロックによって実装されます。イコライザーの入力および出力間の相互スペクトルを計算し、結果の位相特性の線形最小二乗近似を実行することにより、値が推定されます。位相誤差は、比例-積分 (PI) コントローラーによってフィルター処理され、搬送波再生 NCO に供給されます。
取得された波形に内在するタイミング周波数エラーを補正するために、Carrier Recovery, Timing Recovery, and Equalization サブシステムは、切り替え可能なタイミング制御ユニットを使用して、非整数遅延値およびシンボル クロックを生成します。非整数遅延値は、Farrow フィルター構成を使用して入力を内挿する可変遅延ブロックを駆動するために使用されます。可変遅延はVariable Fractional Delayライブラリ ブロックによって実装されます。
シンボル クロックは、9600 sps で実行され、入力信号をダウンサンプリングするために使用されます。入力信号は 4 倍にオーバーサンプリングされ、2400 sym/sec のシンボル レートまで下がります。クロックは、通常、4 サンプルごとに高くなりますが、タイミング周波数オフセットのため、定期的に 5 サンプルごとに高くなります。クロックは、40 サンプル長のフレームにシンボル間隔のデータを作成する、再バッファー操作を駆動します。RLS イコライザーは 40 タップあるため、これらのフレームの処理に最適です。再バッファリングは Carrier Recovery, Timing Recovery, and Equalization > Equalize and Re-Buffer サブシステム内で発生します。このサブシステムは、RLS イコライザーを有効化するフレーム クロックも生成します。また、このフレーム クロックは、9600 sps のオーバーサンプル レートで実行されますが、定格としては 160 サンプルごとに高くなります。タイミング周波数オフセットのために、定期的に 161 サンプルごとに高くなります。
高レート クロックを使用して、低レート処理システムを駆動するというパターンは、通信受信機の設計に自由に使用できます。このパターンは、DSP System Toolbox™ のWWV デジタル受信器 - 同期と検出の例でより基本的な形で示されます。Carrier Recovery, Timing Recovery, and Equalization > Equalize and Re-Buffer サブシステムを以下に示します。

RLS イコライザーによって発生する時間遅延は、相互スペクトル技法で再度推定され、タイミング制御ユニットの NCO を駆動するために使用されます。線形最小二乗近似は、イコライザーの入力と出力間の相互スペクトルの位相特性に生じます。この位相のスロープは、イコライザーによって派生する遅延を推定します。
Decision Feedback Equalizerブロックは RLS アルゴリズムを使用するように構成され、20 のフィードフォワード タップおよび 20 のフィードバック タップがあります。DFE 構造は、Watterson チャネルに起因する深いスペクトル ヌルのために必要です。迅速に収束する RLS 重み付き更新アルゴリズムは、Watterson チャネルの速いフェージングに対抗するために必要です。イコライザーが処理したデータの半分は、学習データです。学習データの大部分は、すばやく変動する HF チャネルのために必要です。学習データが削除されると、イコライザーの出力レートは定格としては 1200 sps になります。また、イコライザーのサブシステムはデスクランブルを実行し、送信機によって実行されたスクランブルの実行を解除します。
Equalize and Re-Buffer サブシステムは、フレーム クロックも生成し、Demodulation and Error Correction サブシステムで実行されたダウンストリーム処理を有効化します。ダウンストリーム サブシステムへのデータは、0.6 秒の期間に相当する 720 サンプル長のフレームにパッケージされます。この 2 番目のフレーム クロックは、最初のクロックと同じように、また 9600 sps のオーバーサンプル レートで実行されますが、定格としては 5760 サンプルごとに高くなります。ただし、以前 4 倍にダウンサンプリングして、シンボルレート データを導出し、破棄されるイコライザーの学習データから 2 倍にダウンサンプリングしたために、クロックは、約 5760/8 = 720 サンプルごとにトリガーします。ただし、タイミング周波数オフセットのため、実際は、クロックは 5762 または 5763 サンプルごとに高くなります。
Demodulation and Error Correction サブシステムは、以下の関数を実行します。
QPSK 復調経由のシンボル抽出
変更されたグレイ符号化
ブロック デインターリーブ
1/2 レートのビタビ復号化、拘束長 7 の畳み込み符号
バイト エラー レートの計算
End-of-message 検出
送信機を駆動したテキスト メッセージの印刷
結果と表示
シミュレーションを実行すると、これらの数値または図による結果が表示されます。
バイト エラー レート
チャネル出力のパワー スペクトル
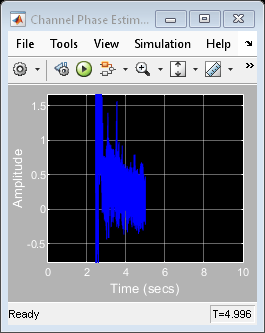
イコライザーの入力および出力間のクロススペクトル位相の推定
Farrow 非整数遅延を駆動するために使用される制御信号
イコライザー入力の散布図
イコライザー出力の散布図
デスクランブラー出力の散布図
復調され復号化されたテキスト メッセージを示すウィンドウ
これらの図は、以下のとおり、チャネル出力のパワー スペクトルから表示されます。

以下は、イコライザーの入力および出力間のクロススペクトル位相の推定です。
以下は、Farrow 非整数遅延を駆動するために使用される制御信号です。

次は、イコライザー入力の散布図です。

次は、イコライザー出力の散布図です。

次は、デスクランブラー出力の散布図です。このデータ転送速度の MIL-STD-188-110A 仕様ごとに、8PSK コンスタレーションが QPSK コンスタレーションに折りたたまれていることに注意してください。

次は、MIL-STD-188-110a 規格 [1] から取った、変調されたメッセージからの抜粋です。

例の検証
この例では、複数のシステム機能を使用して実験し、バイト エラー レート性能に関する影響を調べることができます。たとえば、チャネル モデルの変更による影響をさまざまなディスプレイで確認できます。特に、フェージング周波数選択性チャネルを選択すると、チャネル位相推定、Farrow 制御信号、および散布図表示は、すべて著しく劣化します。
タイミング制御ユニットおよび Farrow 非整数遅延を有効化または無効化できます。タイミング制御ユニットを無効化すると、復調はしばらくの間正常に動作しますが、最終的には、シンボル タイミング周波数オフセットがイコライザーの長さを超え、遅延を補正できなくなります。この時点で、復調処理は完全に停止します。Farrow 非整数遅延を無効化し、タイミング制御ユニットを有効化すると、効果は微妙になります。ただし、この場合、シンボル タイミングがシンボル境界を超えると、散布図が点滅します。これは、ノイズのない場合に最も簡単に見ることができます。
MATLAB Figure ウィンドウで、復調されたメッセージの品質を確認してください。連続的に劣化するチャネルおよび/または受信機のコンフィギュレーションの場合、復調されたメッセージは、次第に判読不可能になります。
このモデルの実行可能なコードを生成するには、Model Parameters サブシステムを使用して、テキスト メッセージの表示を無効にする必要があります。テキスト印刷を実行するブロックは、コードを生成しない Interpreted MATLAB Function ブロックで実装されます。
参考文献
[1] MIL-STD-188-110B: Interoperability and Performance Standards for Data Modems, U. S. Department of Defense, 2000. (A superset of the MIL-STD-188-110A standard)
[2] ITU-R Recommendation 520-2: Use of High Frequency Ionospheric Channel Simulators, 1978/1982/1992.
参考
Defense Communications: US MIL-STD-188-110B Baseband Link-Level Simulationの例では、同期操作なしの MIL-STD-188-110B 送信機および受信機を示します。また、そちらではデータ転送速度を柔軟に選択できますが、この例では 1200 bps の固定データ転送速度です。