このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
AUTOSAR Adaptive ソフトウェア コンポーネント要素の Simulink モデリング環境向けの構成
Simulink® エディターで AUTOSAR Adaptive ソフトウェア コンポーネントの表現を作成した後、Simulink で使用するため、ソフトウェア コンポーネントの要素を構成します。この構成により、AUTOSAR Adaptive ソフトウェア コンポーネントの要素が Simulink モデル化要素にマッピングされます。
AUTOSAR Blockset ソフトウェアは、AUTOSAR コンポーネントのクイック スタート ツールを提供することにより、構成を設定する作業を減らします。必要であれば、コード マッピング エディターと AUTOSAR ディクショナリを使用して初期構成を変更できます。
初期コンポーネント構成の設定
AUTOSAR コンポーネントのクイック スタート ツールを使用して AUTOSAR Adaptive ソフトウェア コンポーネントの初期構成を設定します。
モデル例
my_autosar_LaneGuidanceの保存したバージョンを開きます。AUTOSAR コンポーネントのクイック スタート ツールを実行します。[アプリ] タブから、AUTOSAR コンポーネント デザイナー アプリを開きます。AUTOSAR システム ターゲット ファイルで構成されたマッピングされていないモデルのアプリを開くと、AUTOSAR コンポーネントのクイック スタート ツールが実行されます。
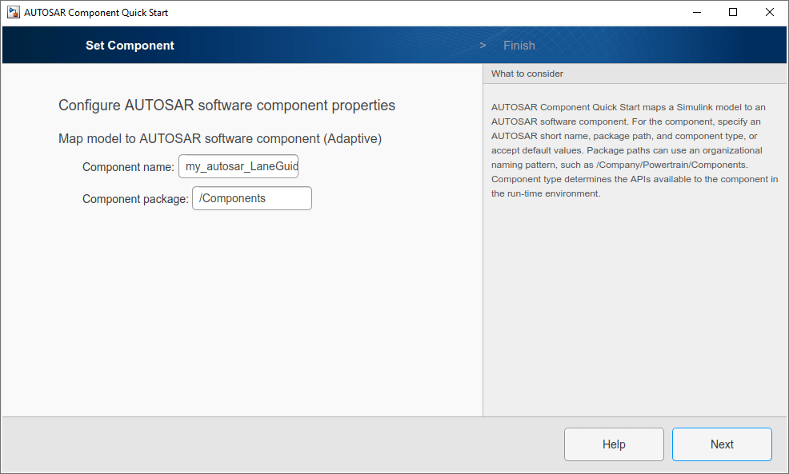
AUTOSAR コンポーネントのクイック スタート ツールのステップを進めます。各ステップで、ツールが AUTOSAR ソフトウェア コンポーネントを Simulink 環境向けに構成するために使用する事項の入力を求められます。このチュートリアルでは、既定値を使用します。
[終了] をクリックした後、ツールは次のことを行います。
AUTOSAR Adaptive ソフトウェア コンポーネントの要素と Simulink モデルの要素との間のマッピングを作成します。
Simulink エディターの AUTOSAR コード パースペクティブでモデルを開きます。AUTOSAR コード パースペクティブには、モデルに加え、モデルのすぐ下にコード マッピング エディターが表示されます。
構成のカスタマイズに使用できるコード マッピング エディターに、AUTOSAR ソフトウェア コンポーネントのマッピングが表示されます。
モデルを保存します。
コンポーネントの構成のカスタマイズ
AUTOSAR コンポーネントのクイック スタート ツールは、AUTOSAR Adaptive ソフトウェア コンポーネントの初期構成を設定します。既存のコンポーネント構成を調整または変更するには、コード マッピング エディターと AUTOSAR ディクショナリを使用します。
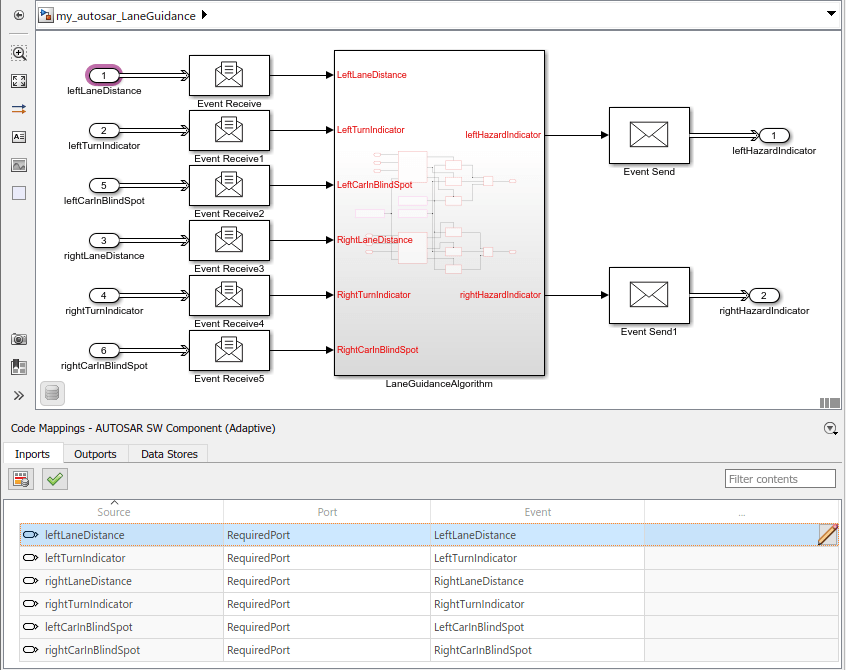
コード マッピング エディターには、Simulink モデルの入力端子と出力端子が各タブに表形式で表示されます。エディターで、Simulink の入力端子と出力端子を AUTOSAR Adaptive ソフトウェア コンポーネントのポートにマッピングします。AUTOSAR Adaptive ソフトウェア コンポーネントのポートは AUTOSAR 規格で定義されます。
まだ、モデル
my_autosar_LaneGuidanceを開いていない場合は開きます。コード マッピング エディターで、Simulink の入力端子および出力端子と AUTOSAR ポートおよびイベントとのマッピングを調べます。各タブで、モデルの要素を選択し、それらの AUTOSAR マッピングや属性を変更することができます。変更内容は、生成される ARXML 記述と C コードに反映されます。
[入力端子] タブを選択します。Simulink の各入力端子について、対応する AUTOSAR ポートのタイプとイベントがエディターにリストされます。たとえば、Simulink の入力端子
leftLaneDistanceは、AUTOSAR の必要なポートとイベントLeftLaneDistanceにマッピングされます。コード マッピング エディターの行を選択して、プロパティ インスペクターを開きます。データ型やその他のモデル データの属性を再設定する必要があるかどうかを確認します。たとえば、イベント データが設計に対して適切に設定されていることを確認します。このチュートリアルでは変更しません。
AUTOSAR 規格のパースペクティブからの AUTOSAR Adaptive ソフトウェア コンポーネントの要素の構成
AUTOSAR ディクショナリを使用して、AUTOSAR ソフトウェア コンポーネントの要素を AUTOSAR 規格のパースペクティブから構成します。
まだ、モデル
my_autosar_LaneGuidanceを開いていない場合は開きます。AUTOSAR ディクショナリを開きます。コード マッピング エディターで、AUTOSAR ディクショナリ ボタン
 をクリックします。コード マッピング エディターで最後に選択してマッピングした Simulink 要素に対応する AUTOSAR のビューで AUTOSAR ディクショナリが開きます。Simulink 入力端子を選択してマッピングした場合、[RequiredPorts] ビューでディクショナリが開き、入力端子をマッピングした AUTOSAR ポートが表示されます。
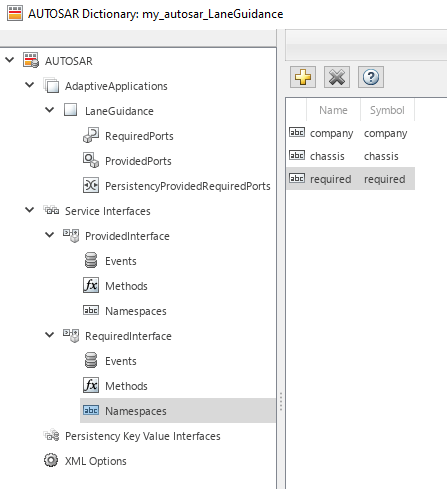
をクリックします。コード マッピング エディターで最後に選択してマッピングした Simulink 要素に対応する AUTOSAR のビューで AUTOSAR ディクショナリが開きます。Simulink 入力端子を選択してマッピングした場合、[RequiredPorts] ビューでディクショナリが開き、入力端子をマッピングした AUTOSAR ポートが表示されます。AUTOSAR ディクショナリには、マッピングされた AUTOSAR ソフトウェア コンポーネントとその要素、インターフェイス、および XML オプションがツリー形式で表示されます。
AUTOSAR ディクショナリを使用してさらにコンポーネント構成をカスタマイズします。たとえば、ディクショナリを使用して次のことができます。
サービス インターフェイス ノードを展開して、既定のコンポーネントのマッピング中に作成された AUTOSAR イベントを調べる。
各サービス インターフェイスに一意の名前空間を定義する。モデルの C++ コードの生成時に、コード ジェネレーターは定義済みの名前空間を使用します。
エクスポートされた AUTOSAR XML の特性を設定する。
ディクショナリの左側のペインで、ツリー ノードを展開して、モデルに何が定義されているか調べます。
このチュートリアルでは、サービス インターフェイス
ProvidedInterfaceとRequiredInterfaceの名前空間を追加します。ディクショナリの左側のペインで、[サービス インターフェイス] ノード、次に [ProvidedInterface] ノードを展開します。
[名前空間] を選択します。
右側のペインで、プラス記号をクリックします。
[名前] と [記号] を
companyに設定します。chassisおよびprovidedの名前空間エントリを追加します。[RequiredInterface] ノードに対して名前空間エントリ
company、chassis、およびrequiredを追加します。
ディクショナリを閉じます。
モデルを保存します。
次に、AUTOSAR ソフトウェア コンポーネントをシミュレーションします。