AUTOSAR Adaptive コンポーネントおよびコンポジションの追加と接続
AUTOSAR アーキテクチャ モデルを作成したら、AUTOSAR Classic または AUTOSAR Adaptive の最上位ソフトウェア設計を作成します。コンポジション エディターには、AUTOSAR 仮想機能バス (VFB) に基づいて AUTOSAR ソフトウェア アーキテクチャが表示されます。
まず、Simulink® ツールストリップの [モデル化] タブで [プラットフォーム] をクリックし、[Adaptive Platform] を選択して Adaptive アーキテクチャのモデル化を構成します。その後、コンポジション エディターと [モデル化] タブを使用して、AUTOSAR ソフトウェア コンポジションおよび Adaptive コンポーネントを追加し、接続できます。
または、ARXML ファイルからソフトウェア コンポジションをインポートできます。ARXML からの AUTOSAR コンポジションのインポートを参照してください。
Adaptive Component ブロックの追加と接続
アーキテクチャ モデルに AUTOSAR Adaptive ソフトウェア コンポーネントを追加し、接続するには、次のようにします。
コンポーネントを追加する。
[モデル化] タブまたはキャンバスの左側にあるパレットから、Adaptive Component ブロックを追加します。プロパティ インスペクターを使用してブロックを検査できます。Adaptive アーキテクチャのモデル化のコンポーネントの [種類] は
[AdaptiveApplication]です。コンポーネントの要求側ポートと提供側ポートを追加する。
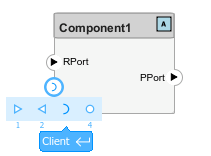
各コンポーネント ポートを追加するには、Adaptive Component ブロックの端をクリックします。サービス インターフェイスを介した通信をモデル化するためのポートのコントロールが表示されます。
イベント通信の場合、要求側ポートには [入力]、提供側ポートには [出力] を選択します。
メソッド通信の場合、要求側ポートには [クライアント]、提供側ポートには [サーバー] を選択します。
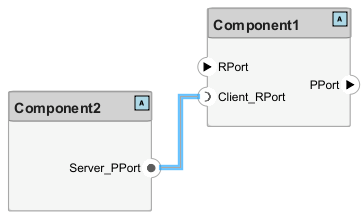
ブロックの端子を接続する。
Adaptive Component ブロックを他のブロックに接続するには、ブロックの端子を信号線で接続します。Adaptive Component ブロックの相互接続は、2 つの通信エンドポイント間のサービス指向の通信を表します。
ルート端子を接続する。
Adaptive Component ブロックをアーキテクチャまたはコンポジション モデルのルート端子に接続するには、コンポーネントのポートから、それが含まれるモデルの境界に線をドラッグします。
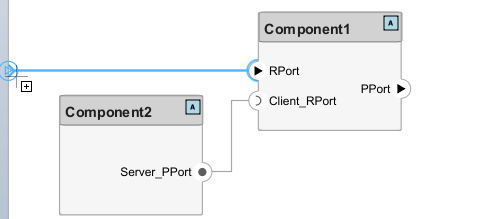
接続を解放すると、境界にルート端子が作成されます。
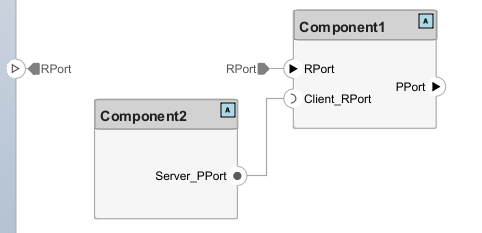
プロパティ インスペクターを使用して、追加の AUTOSAR プロパティを構成する。
例として、クライアント/サーバー アーキテクチャ モデルのコンポーネントを追加して接続します。このモデルは、要求側ポートを介して生データを受信し、そのデータをフィルター サービス コンポーネントのメソッド呼び出しを使用してフィルター処理してから、フィルター処理したデータを提供側ポートを介して送信するセンサー クライアント コンポーネントで構成されています。
Simulink スタート ページを使用して、AUTOSAR アーキテクチャ モデルを作成します(詳細については、AUTOSAR アーキテクチャ モデルの作成を参照してください)。モデル キャンバスには最初は何も表示されていません。
[モデル化] タブで [プラットフォーム] をクリックし、
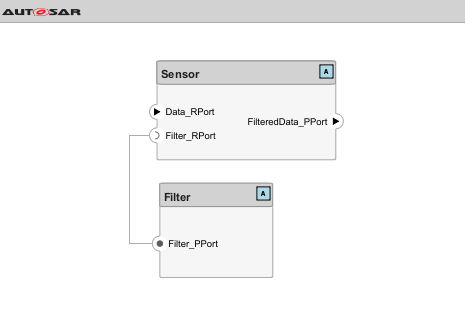
[Adaptive Platform]を選択します。[モデル化] タブまたはパレットで、2 つの Adaptive Component ブロックを追加します。1 つ目のブロックに
Sensor、2 つ目のブロックにFilterというラベルを付けます。FilterコンポーネントをSensorコンポーネントの下に配置します。SensorコンポーネントとFilterコンポーネントにポートを追加します。Sensorコンポーネントにクライアント ポートを追加し、Filter_RPortというラベルを付けます。Filterコンポーネントにサーバー ポートを追加し、Filter_PPortというラベルを付けます。2 つのポートを接続します。
Sensorコンポーネントに入力端子を追加し、Data_RPortというラベルを付けます。Sensorコンポーネントに出力端子を追加し、FilteredData_PPortというラベルを付けます。ラベルが収まるように、必要に応じてSensorコンポーネントのサイズを変更します。
Data_RPortポートとFilteredData_PPortポートをアーキテクチャ モデルのルート端子に接続します。各ポートからモデル境界に線をドラッグします。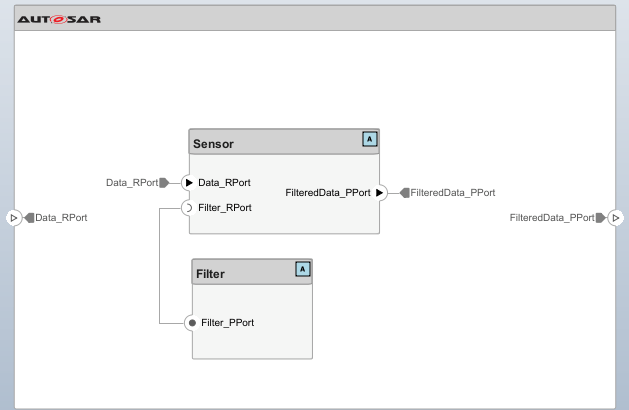
これで設計は完成ですが、まだ AUTOSAR コンポーネントに動作が定義されていません。
次のステップでは、モデルの作成、インポート、またはリンクによって、Simulink の動作を AUTOSAR コンポーネントに追加します。モデルの作成またはリンクによる AUTOSAR コンポーネントの動作の定義を参照してください。
Requirements Toolbox™ ソフトウェアをお持ちの場合、AUTOSAR アーキテクチャ モデル内のコンポーネントを要件にリンクできます。AUTOSAR コンポーネントと要件のリンクを参照してください。
Adaptive モデルへのコンポジション ブロックの追加と接続
アーキテクチャ モデルで入れ子にされた AUTOSAR ソフトウェア コンポジションを追加し、接続するには、次のようにします。
[モデル化] タブまたはキャンバスの左側にあるパレットから、Software Composition ブロックを追加する。
コンポジションの要求側ポートと提供側ポートを追加する。各コンポジション ポートを追加するには、Software Composition ブロックの端をクリックします。サービス インターフェイスを介した通信をモデル化するためのポートのコントロールが表示されます。
イベント通信の場合、要求側ポートには [入力]、提供側ポートには [出力] を選択します。
メソッド通信の場合、要求側ポートには [クライアント]、提供側ポートには [サーバー] を選択します。
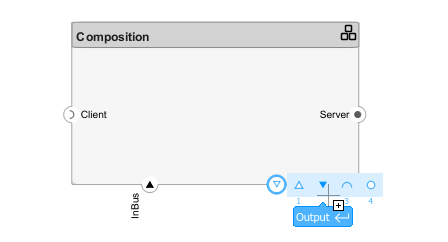
あるいは、Software Composition ブロックを開きます。各コンポジション ポートを追加するには、コンポジション ブロック線図の境界をクリックします。ポートのコントロールが表示されたら、インターフェイスに応じて、要求側ポートには [入力] または [クライアント]、提供側ポートには [出力] または [サーバー] を選択します。
Software Composition ブロックを他のブロックに接続するには、ブロックの端子を信号線で接続する。
Software Composition ブロックをアーキテクチャまたはコンポジション モデルのルート端子に接続するには、コンポジションのポートから、それが含まれるモデルの境界に線をドラッグする。

接続を解放すると、境界にルート端子が作成されます。
プロパティ インスペクターを使用して、追加の AUTOSAR プロパティを構成する。
AUTOSAR コンポジションには、共通の目的をもつ一連の AUTOSAR コンポーネントとコンポジションが含まれます。コンポジションを追加するには、Software Composition ブロックを開いて、さらなる Adaptive Component ブロックおよび Software Composition ブロックの追加を開始します。
参考
Adaptive Component | Software Composition