このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
誘導、航法、制御 (GNC)
ガイダンス ブロックを使用して 2 機の機体間の距離を計算し、コントローラー ブロックを使用して、機体の経路、位置、速度、機体にかかる力など、機体の動きを制御します。ナビゲーション ブロックを使用して、3 つの軸それぞれに加速度計、ジャイロスコープ、慣性測定ユニット (IMU) をモデル化します。IMU には、3 軸加速度計が 1 つと 3 軸ジャイロスコープが1 つずつ含まれています。パイロット クロスオーバー、精度、および Tustin モデルを実装します。
カテゴリ
注目の例
軽量航空機設計
軽量航空機の設計を使用して、航空機設計の技術的およびプロセス的な課題に対処します。
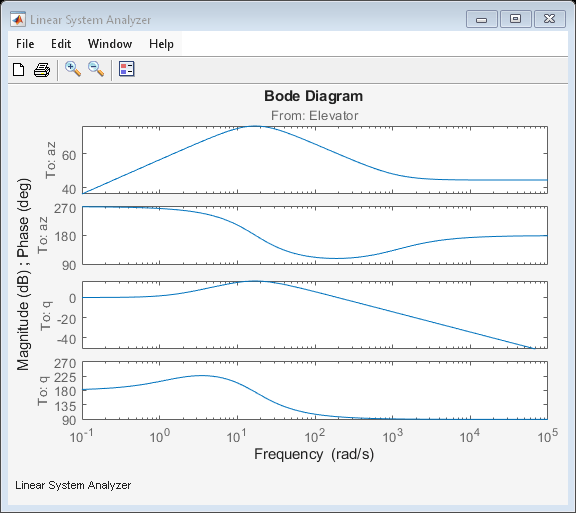
Simulink Control Design による機体のトリムと線形化
Simulink® Control Design™ を使用して機体をトリムおよび線形化します。

Parrot Minidrone に基づくクアッドコプターのモデリングとシミュレーション
Parrot® シリーズのミニドローンをベースにしたクアッドコプターをモデル化します。

オプションの FlightGear インターフェイスを使用した HL-20 プロジェクト
NASA HL-20 リフティング ボディとコントローラーを Simulink と Aerospace Blockset™ でモデル化し、可視化には FlightGear を使用します。

アポロ月着陸船のデジタル自動操縦の開発
Simulink と Aerospace Blockset を使用して、アポロ月着陸船のデジタル自動操縦装置を開発します。
真対気速度計算による指示対気速度
Ideal Airspeed Correction ブロックを使用して、真対気速度から指示対気速度を計算します。

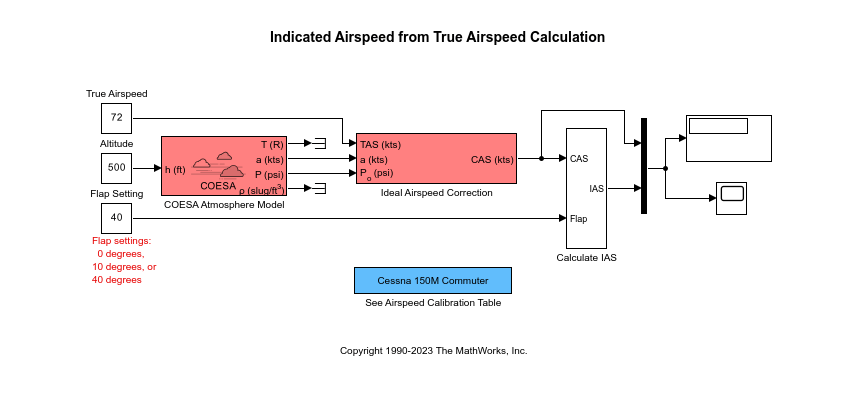
指示対気速度計算による真対気速度
Ideal Airspeed Correction ブロックを使用して、真対気速度から指示対気速度を計算します。
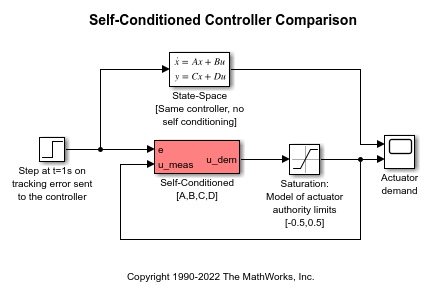
自己調整型コントローラの比較
自己条件付け形式の状態空間コントローラ [A,B,C,D] の実装と一般的な状態空間コントローラ [A,B,C,D] の実装を比較します。

Transition from Low- to High-Fidelity UAV Models in Three Stages
Evolve UAV plant model continuously to stay in sync with the latest information available.