このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
コントロール
1次元、2次元、3次元タイプなど、さまざまなコントローラをシミュレートします
実装アーキテクチャが設計に与える影響を調査します。フォームには、1 次元、2 次元、3 次元のゲイン スケジューリング、線形補間、オブザーバーおよび自己調整フォーム、1 次元、2 次元、3 次元のマトリックス補間用の定義済みの状態空間コントローラー ブロックが含まれます。
ブロック
| 1D Controller [A(v),B(v),C(v),D(v)] | Implement gain-scheduled state-space controller depending on one scheduling parameter |
| 1D Controller Blend u=(1-L).K1.y+L.K2.y | Implement 1-D vector of state-space controllers by linear interpolation of their outputs |
| 1D Observer Form [A(v),B(v),C(v),F(v),H(v)] | Implement gain-scheduled state-space controller in observer form depending on one scheduling parameter |
| 1D Self-Conditioned [A(v),B(v),C(v),D(v)] | Implement gain-scheduled state-space controller in self-conditioned form depending on one scheduling parameter |
| 2D Controller [A(v),B(v),C(v),D(v)] | Implement gain-scheduled state-space controller depending on two scheduling parameters |
| 2D Controller Blend | Implement 2-D vector of state-space controllers by linear interpolation of their outputs |
| 2D Observer Form [A(v),B(v),C(v),F(v),H(v)] | Implement gain-scheduled state-space controller in observer form depending on two scheduling parameters |
| 2D Self-Conditioned [A(v),B(v),C(v),D(v)] | Implement gain-scheduled state-space controller in self-conditioned form depending on two scheduling parameters |
| 3D Controller [A(v),B(v),C(v),D(v)] | Implement gain-scheduled state-space controller depending on three scheduling parameters |
| 3D Observer Form [A(v),B(v),C(v),F(v),H(v)] | Implement gain-scheduled state-space controller in observer form depending on three scheduling parameters |
| 3D Self-Conditioned [A(v),B(v),C(v),D(v)] | Implement gain-scheduled state-space controller in self-conditioned form depending on two scheduling parameters |
| Gain Scheduled Lead-Lag | ゲインスケジュール係数を用いた一次リードラグの実装 |
| Interpolate Matrix(x) | 与えられた入力に対する補間行列を返す |
| Interpolate Matrix(x,y) | 与えられた入力に対する補間行列を返す |
| Interpolate Matrix(x,y,z) | 与えられた入力に対する補間行列を返す |
| Self-Conditioned [A,B,C,D] | Implement state-space controller in self-conditioned form |
注目の例
軽量航空機設計
軽量航空機の設計を使用して、航空機設計の技術的およびプロセス的な課題に対処します。
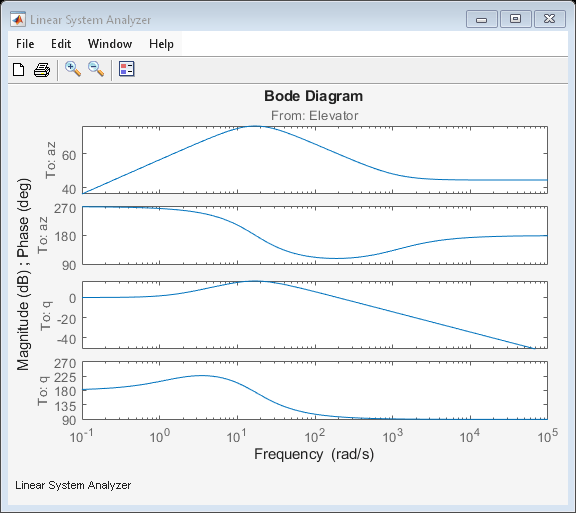
Simulink Control Design による機体のトリムと線形化
Simulink® Control Design™ を使用して機体をトリムおよび線形化します。
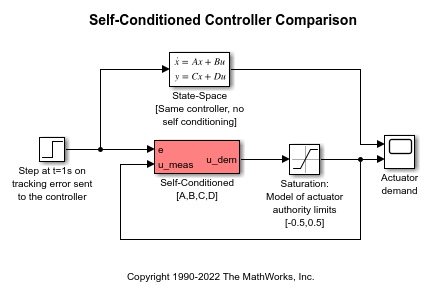
自己調整型コントローラの比較
自己条件付け形式の状態空間コントローラ [A,B,C,D] の実装と一般的な状態空間コントローラ [A,B,C,D] の実装を比較します。

Parrot Minidrone に基づくクアッドコプターのモデリングとシミュレーション
Parrot® シリーズのミニドローンをベースにしたクアッドコプターをモデル化します。