このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
自己調整型コントローラの比較
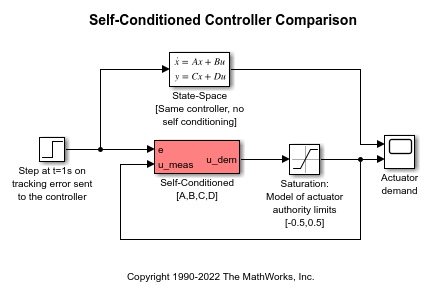
この例では、自己条件付け形式の状態空間コントローラ [A、B、C、D] の実装と一般的な状態空間コントローラ [A、B、C、D] の実装を比較する方法を示します。このモデルにはControl System Toolbox™ソフトウェアが必要です。
自己調整型状態空間コントローラの場合、測定された制御値が要求された制御値と等しい場合 (u_meas = u_dem)、コントローラの実装は一般的な状態空間コントローラ [A、B、C、D] になります。ただし、測定された制御値 (u_meas) が制限されている場合 (レート制限など)、コントローラーの極はマスク ダイアログ ボックスで定義された極になります。
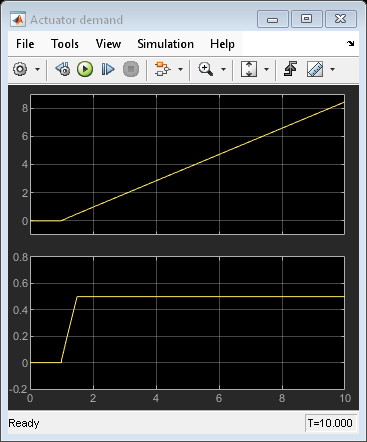
典型的な状態空間コントローラ [A、B、C、D] と、測定された制御値が制限された自己調整状態空間コントローラの結果を以下に示します。