このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
デ・ハビランド・ビーバーを飛ばす
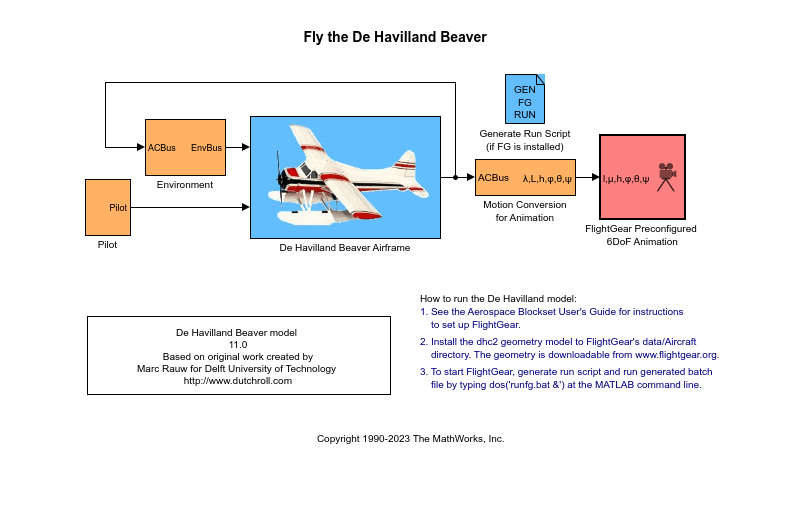
このモデルは、Simulink ® および Aerospace Blockset ™ ソフトウェアを使用して De Havilland Beaver をモデル化する方法を示しています。また、パイロットのジョイスティックを使用してデ・ハビランド・ビーバーを操縦する方法も紹介します。このモデルは、Aerospace Blockset ブロックを見つけやすくするために色分けされています。赤いブロックは Aerospace Blockset ブロック、オレンジ色のブロックは追加の Aerospace Blockset ブロックを含むサブシステム、白いブロックは Simulink ブロックです。
De Havilland Beaver モデルには、機体のダイナミクスと空気力学が含まれています。着陸段階の風のプロファイルなど、環境の影響もモデル化されます。このモデルの可視化は、オープンソースのフライトシミュレーター パッケージである FlightGear へのインターフェースを介して行われます。
FlightGearインターフェースの詳細については、次のドキュメント トピックをお読みください。
open_system('asbdhc2'); snapshotModel('asbdhc2');
デ・ハビランド・ビーバーは1947年に初飛行しました。現在でも、その信頼性と多用途性からパイロットに高く評価されています。デ・ハビランド ビーバーは、車輪、スキー、またはフロート着陸装置で操縦できます。
最高速度:110ノット、最高高度:10,000フィート、最大範囲:400 nm、負荷:乗客6名、乗員:メンバー1名。
参考
6DOF (Quaternion) | COESA Atmosphere Model | Discrete Wind Gust Model | Dryden Wind Turbulence Model (Continuous) | FlightGear Preconfigured 6DoF Animation | Generate Run Script | Wind Shear Model