このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
Direction Cosine Matrix ECEF to NED
測地緯度と経度を方向余弦行列に変換する

ライブラリ:
Aerospace Blockset /
Utilities /
Axes Transformations
説明
Direction Cosine Matrix ECEF to NED ブロックは、測地緯度と経度を 3 行 3 列の方向余弦行列(DCM) に変換します。DCM マトリックスは、地球中心の地球固定(ECEF) 軸のベクトルを北東下 (NED) 軸のベクトルに変換する座標変換を実行します。方向余弦行列の詳細については、アルゴリズム を参照してください。
ECEF 座標系の実装では、原点が惑星の中心にあり、x 軸がグリニッジ子午線と赤道と交差し、z 軸が惑星の平均回転軸で北が正であり、y 軸が右手系を完成させると想定されています。詳細については、ECI and ECEF Coordinatesを参照してください。
例
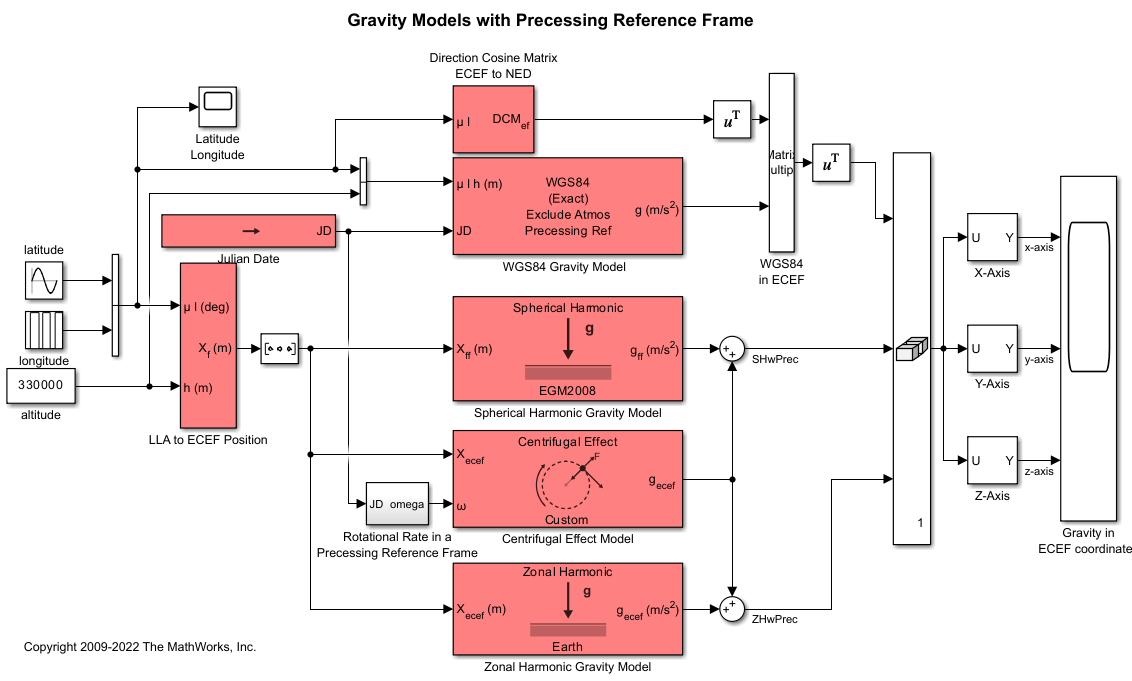
歳差参照フレームを持つ重力モデル
Aerospace Blockset™ ブロックを使用して、歳差参照フレームを持つさまざまな重力モデルを実装します。
端子
入力
Output
アルゴリズム
DCM マトリックスは、ECEF 軸のベクトル (ox0、oy0、oz0) を NED 軸のベクトル (ox2、oy2、oz2) に変換する座標変換を実行します。これを実現するために必要な軸の回転の順序は次のとおりです。
oz0 を中心に経度 (ι) を軸 (ox1、oy1、oz1) まで回転
測地緯度 (μ) を通る oy1 を中心とした回転 (ox2、oy2、oz2)
2 つの軸変換行列を組み合わせると、次の DCM が定義されます。
参照
[1] Stevens, B. L., and F. L. Lewis. Aircraft Control and Simulation, Hoboken, NJ: John Wiley & Sons, 1992.
[2] Zipfel, Peter H., Modeling and Simulation of Aerospace Vehicle Dynamics. Second Edition. Reston, VA: AIAA Education Series, 2000.
[3] Recommended Practice for Atmospheric and Space Flight Vehicle Coordinate Systems, R-004-1992, ANSI/AIAA, February 1992.
拡張機能
バージョン履歴
R2006a より前に導入