このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
歳差参照フレームを持つ重力モデル
この例では、Aerospace Blockset ™ ブロックを使用して歳差参照フレームを持つさまざまな重力モデルを実装する方法を示します。歳差運動とは、回転体の回転軸の方向の変化です。地球の自転軸の向きによって、さまざまな位置で発生する角速度が決まり、それが計算される遠心力に影響します。Aerospace Blockset ブロックは赤で表示されます。
モデル例を開く
例の asbGravWPrec.slx は、本初子午線に沿った地上軌道と 10 秒周期で地球上空 330 km の参照軌道をシミュレートするように構成されています。
open_system('asbGravWPrec.slx');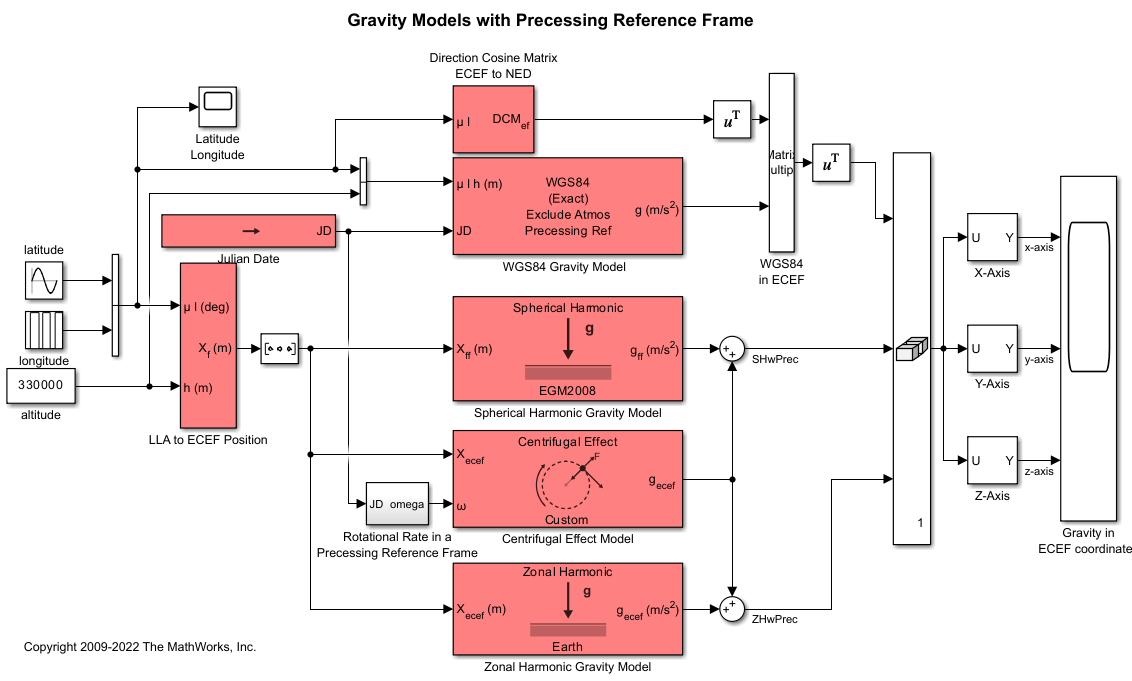
まとめ
この例では、次の重力モデル ブロックを使用して重力を計算する方法を示します。WGS84、球面調和関数、帯状調和関数の重力モデル。
球面調和モデルと帯状調和モデルでは、地心地球固定 (ECEF) フレームでの位置が必要なので、この例では測地緯度と経度から ECEF 座標への座標変更を実行する必要があります。
帯状重力モデルと球面調和重力モデルにも遠心力の影響は含まれていないため、遠心力は個別に計算し、それぞれの重力モデルに合計する必要があります。
地球の歳差運動とそれが自転速度に与える影響を考慮するために、遠心効果モデル ブロックは、指定されたユリウス日の特定の自転速度を使用して遠心力を計算します。ユリウス日が遠心力に与える影響を考慮することは、地球の歳差運動の影響を無視できない長時間のシミュレーションに役立ちます。
この例ではコリオリの加速度は考慮されていません。
WGS84 重力モデルは、北東下 (NED) フレームの重力成分を出力します。重力モデルを比較するために、この例では方向余弦行列 (DCM) を計算し、結果を ECEF フレームに変換して、他の 2 つのモデルから計算された重力値と一致するようにします。
地心地球固定(ECEF)位置を決定する
ゾーン調和重力モデルと球面調和重力モデルを使用するには、ECEF 参照フレーム内の位置が必要です。測地緯度、経度、高度から ECEF の位置を決定するには、LLA to ECEF Position ブロックを使用します。

地球の帯状調和重力を計算する
Zonal Harmonic Gravity Model ブロックを使用して、ECEF 座標系の 4 次までの重力成分をメートル毎秒の 2 乗で計算します。

このブロックには惑星の回転による遠心力の影響と歳差運動する参照フレームの影響が含まれていないため、遠心力の影響による重力成分を計算するには Centrifugal Effect Model ブロックを使用します。

歳差運動の影響を含めるには、惑星の回転速度を入力するチェックボックスをオンにします。

このチェック ボックスを選択すると、ブロックに回転速度を指定するための追加の入力ポートが作成されます。地球の歳差運動が自転速度に与える影響は、サブシステム 歳差運動参照フレームでの回転速度 の方程式を通じて、ユリウス日の関数として正確に近似できます。
地球の球面調和重力を計算する
ECEF 座標系の重力成分をメートル毎秒の平方で計算するには、デフォルトの EGM2008 中心体モデルを選択し、デフォルトの度数を 120 にして Spherical Harmonic Gravity Model ブロックを使用します。このブロックには惑星の自転による遠心力の影響は含まれません。総重力ポテンシャルを取得するには、計算された値に遠心効果の重力成分を追加します。

地球のWGS84重力を計算する
WGS84 重力モデルを使用して、NED 座標系のゾーン調和重力成分をメートル毎秒の平方で計算します。デフォルトでは、WGS84 正確重力モデルには遠心力の影響は含まれません。遠心力の影響を含めるには、[遠心力の影響なし] チェックボックスをオフにします。

重力モデルを比較するには、それらの出力が同じ座標系にある必要があります。NED 座標に方向余弦行列 (DCM) を乗算することで、WGS84 重力を NED 座標から ECEF 座標に変換できます。この行列は、2 つの座標フレーム間で値を変換する 3 行 3 列の変換行列です。DCM を生成するには、Direction Cosine Matrix ECEF to NED ブロックを使用します。このブロックは、入力緯度と経度を受け入れ、ECEF 座標フレームの座標を NED 座標フレームに変換するために必要な DCM を返します。

結果の DCM は ECEF から NED 座標フレームへの変換用であるため、転置ブロックを使用して結果の行列の転置を取り、NED から ECEF への DCM を生成します。
遠心力の影響を考慮した異なる重力モデルの比較図
モデルをシミュレートし、軌道の緯度 (黄色) と経度 (青色) の位置履歴を観察します。
sim('asbGravWPrec.slx');
図 1: 緯度と経度の位置履歴
この図は、各重力モデルが計算する重力成分の時間履歴を示しています。軌道に沿ったさまざまなポイントで重力を計算すると、モデル間の結果が似ていることがわかります。違いは比較的小さいですが、シミュレーションの軌道はオープン ループ システム (軌道は重力を使用して計算されない) であり、クローズド ループ システムで考慮すると、時間の経過とともに影響がより大きくなることに注意することが重要です。

図 2: 地心地球固定座標系における重力成分
参考
WGS84 Gravity Model | Spherical Harmonic Gravity Model | Centrifugal Effect Model | Zonal Harmonic Gravity Model