このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
Custom Variable Mass 6DOF (Euler Angles)
カスタム可変質量の6自由度運動方程式のオイラー角表現を実装する

ライブラリ:
Aerospace Blockset /
Equations of Motion /
6DOF
説明
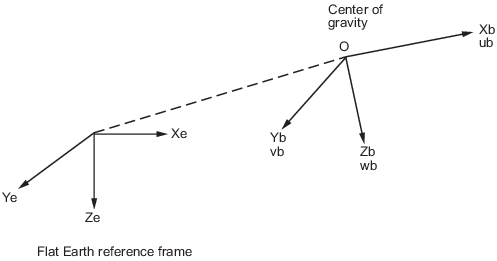
Custom Variable Mass 6DOF (Euler Angles) ブロックは、カスタム可変質量の 6 自由度の運動方程式のオイラー角表現を実装します。これは、平面地球基準フレーム (Xe, Ye, Ze) を中心とした物体固定座標フレーム (Xb, Yb, Zb) の回転を考慮します。オイラー角の詳細については、アルゴリズム を参照してください。
制限
ブロックは、加えられた力が体の重心に作用することを前提としています。
端子
入力
出力
パラメーター
アルゴリズム
物体固定座標系の原点は物体の重心です。物体は剛体であると想定されるため、個々の質量要素間に作用する力を考慮する必要がありません。平面地球の基準フレームは慣性であると考えられており、これは「恒星」に対する地球の運動による力を無視できる優れた近似です。
ボディ固定座標系の並進運動は以下のように表されます。ここで、適用された力 [Fx Fy Fz]T はボディ固定座標系内にあります。Vreb は、質量流量 () がボディ固定軸から排出または追加されるボディ軸内の相対速度です。
物体固定フレームの回転ダイナミクスは以下のように示され、適用されるモーメントは[L M N]Tであり、慣性テンソルIは原点Oに対してである。
物体固定角速度ベクトル [p q r]T とオイラー角の変化率 の関係は、オイラー角の速度を物体固定座標系に分解することで決定できます。
|
J を反転すると、オイラー速度ベクトルを決定するために必要な関係が得られます。
航空宇宙座標系の詳細については、航空宇宙座標系について を参照してください。
参照
[1] Stevens, Brian, and Frank Lewis. Aircraft Control and Simulation, 2nd ed. Hoboken, NJ: John Wiley & Sons, 2003.
[2] Zipfel, Peter H. Modeling and Simulation of Aerospace Vehicle Dynamics. 2nd ed. Reston, VA: AIAA Education Series, 2007.
拡張機能
バージョン履歴
R2006a で導入
参考
6DOF (Euler Angles) | 6DOF (Quaternion) | 6DOF ECEF (Quaternion) | 6DOF Wind (Quaternion) | 6DOF Wind (Wind Angles) | Custom Variable Mass 6DOF (Quaternion) | Custom Variable Mass 6DOF ECEF (Quaternion) | Custom Variable Mass 6DOF Wind (Quaternion) | Custom Variable Mass 6DOF Wind (Wind Angles) | Simple Variable Mass 6DOF (Euler Angles) | Simple Variable Mass 6DOF (Quaternion) | Simple Variable Mass 6DOF ECEF (Quaternion) | Simple Variable Mass 6DOF Wind (Quaternion) | Simple Variable Mass 6DOF Wind (Wind Angles)