このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
6DOF
オイラー角と四元数数表現を使用して、シミュレーションで6自由度の運動方程式を実装します。
固定質量または可変質量の大気圏内の飛行体の質点および 6 自由度のダイナミクスをモデル化およびシミュレートします。また、機体、風、地球中心地球固定 (ECEF) 座標系の運動方程式の表現を定義できます。モデルの整合性を確認するため、座標系間の変換および単位変換を行います。
ブロック
| 6DOF Acceleration | Compute acceleration of body in six-degrees-of-freedom motion (R2025a 以降) |
| 6DOF Angular Acceleration | Compute angular acceleration of body in six-degrees-of-freedom motion (R2025a 以降) |
| 6DOF (Euler Angles) | 6自由度の運動方程式のオイラー角表現を実装する |
| 6DOF (Quaternion) | ボディ軸に関する6自由度の運動方程式の四元数表現を実装する |
| 6DOF ECEF (Quaternion) | 地球中心の地球固定(ECEF)座標系における6自由度の運動方程式の四元数数表現を実装する |
| 6DOF Wind (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion with respect to wind axes |
| 6DOF Wind (Wind Angles) | 6自由度の運動方程式の風角表現を実装する |
| Custom Variable Mass 6DOF (Euler Angles) | カスタム可変質量の6自由度運動方程式のオイラー角表現を実装する |
| Custom Variable Mass 6DOF (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion of custom variable mass with respect to body axes |
| Custom Variable Mass 6DOF ECEF (Quaternion) | 地心地球固定(ECEF)座標系におけるカスタム可変質量の6自由度運動方程式の四元数表現を実装する |
| Custom Variable Mass 6DOF Wind (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion of custom variable mass with respect to wind axes |
| Custom Variable Mass 6DOF Wind (Wind Angles) | Implement wind angle representation of six-degrees-of-freedom equations of motion of custom variable mass |
| Simple Variable Mass 6DOF (Euler Angles) | Implement Euler angle representation of six-degrees-of-freedom equations of motion of simple variable mass |
| Simple Variable Mass 6DOF (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion of simple variable mass with respect to body axes |
| Simple Variable Mass 6DOF ECEF (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion of simple variable mass in Earth-centered Earth-fixed (ECEF) coordinates |
| Simple Variable Mass 6DOF Wind (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion of simple variable mass with respect to wind axes |
| Simple Variable Mass 6DOF Wind (Wind Angles) | Implement wind angle representation of six-degrees-of-freedom equations of motion of simple variable mass |
トピック
- Fundamental Coordinate System Concepts
Define coordinate systems when working with the Aerospace Blockset™ software.
注目の例
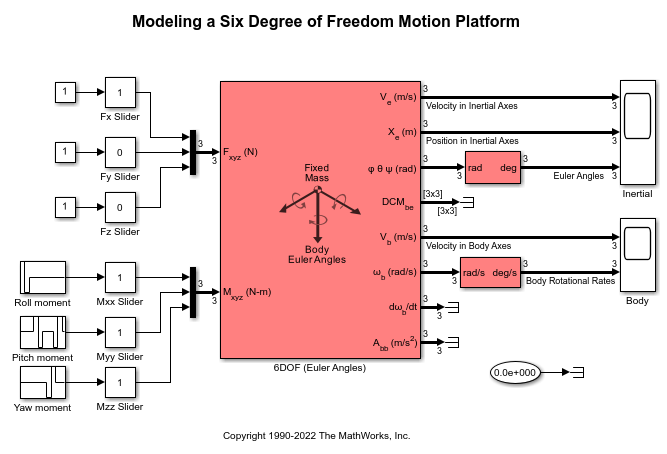
6自由度モーションプラットフォームのモデリング
6自由度の運動方程式ブロックの入力と出力を接続します。