このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
3DOF (Body Axes)
ボディ軸に関する3自由度の運動方程式を実装する
ライブラリ:
Aerospace Blockset /
Equations of Motion /
3DOF
説明
3DOF (Body Axes) ブロックは、ボディ軸に関する 3 自由度の運動方程式を実装します。これは、平面地球基準座標系を中心とした、ボディ固定座標系の垂直面内での回転を考慮します。回転と運動方程式の詳細については、アルゴリズム を参照してください。
端子
入力
ボディの x 軸に沿って適用される力。Units で選択された単位でスカラーとして指定されます。
データ型: double
ボディの z 軸に沿って適用される力。Units で選択された単位でスカラーとして指定されます。
データ型: double
適用されたピッチング モーメント。Units で選択された単位でスカラーとして指定されます。
データ型: double
スカラーとして指定された重力。
依存関係
このポートを有効にするには、重力源 を External に設定します。
データ型: double
Output
±pi 内のピッチ姿勢が、ラジアン単位のスカラーとして返されます。
データ型: double
ピッチ角速度。ラジアン/秒単位のスカラーとして返されます。
データ型: double
ピッチ角加速度。ラジアン毎秒毎秒でスカラーとして返されます。
データ型: double
平面地球基準座標系 (Xe, Ze) におけるボディの位置が、2 要素のベクトルとして返されます。
データ型: double
ボディ固定座標系に分解されたボディの速度 (u, w) が、2 要素ベクトルとして返されます。
データ型: double
ボディ固定座標系 (Ax, Az) に対するボディの加速度が、Units で選択された単位で 2 要素ベクトルとして返されます。
データ型: double
慣性(平面地球)座標系に対するボディの加速度。2 要素ベクトルとして返されます。通常、この信号を加速度計に接続します。
依存関係
このポートを有効にするには、慣性加速度を含める チェックボックスをオンにします。
データ型: double
パラメーター
メイン
入力および出力単位。Metric (MKS)、English (Velocity in ft/s)、または English (Velocity in kts) として指定されます。
| 単位 | 力 | モーメント | 高速化 | 速度 | 位置 | 質量 | 慣性 |
|---|---|---|---|---|---|---|---|
Metric (MKS) | ニュートン | ニュートンメートル | メートル毎秒毎秒 | メートル/秒 | メートル | キログラム | キログラムメートル2乗 |
English (Velocity in ft/s) | ポンド | フィート-ポンド | フィート毎秒毎秒 | フィート/秒 | フィート | スラグ | スラグ フィートの平方 |
English (Velocity in kts) | ポンド | フィート-ポンド | フィート毎秒毎秒 | ノット | フィート | スラグ | スラグ フィートの平方 |
プログラムでの使用
ブロック パラメーター: units |
| 型: 文字ベクトル |
値: Metric (MKS) | English (Velocity in ft/s) | English (Velocity in kts) |
既定: Metric (MKS) |
ボディ軸または風軸。Wind または Body として指定されます。
プログラムでの使用
ブロック パラメーター: axes |
| 型: 文字ベクトル |
値: Wind | Body |
既定: Body |
質量タイプは、次の表に従って指定されます。
| 質量タイプ | 説明 | デフォルト |
|---|---|---|
Fixed | 質量はシミュレーション全体を通じて一定です。 | |
Simple Variable | 質量と慣性は質量率の関数として直線的に変化します。 | |
Custom Variable | 質量と慣性の変動はカスタマイズ可能です。 |
Fixed 選択は、前述の運動方程式に準拠します。
プログラムでの使用
ブロック パラメーター: mtype |
| 型: 文字ベクトル |
値: Fixed | Simple Variable | Custom Variable |
既定: 'Fixed' |
ボディの初期速度 (V0) をスカラーとして指定します。
プログラムでの使用
ブロック パラメーター: v_ini |
| 型: 文字ベクトル |
値: '100' | スカラー |
既定: '100' |
ボディの初期ピッチ姿勢(θ0) をスカラーとして指定します。
プログラムでの使用
ブロック パラメーター: theta_ini |
| 型: 文字ベクトル |
値: '0' | スカラー |
既定: '0' |
初期ピッチ回転速度 (q0) をスカラーとして指定します。
プログラムでの使用
ブロック パラメーター: q_ini |
| 型: 文字ベクトル |
値: '0' | スカラー |
既定: '0' |
速度ベクトルとボディ間の初期角度 (α0) をスカラーとして指定します。
プログラムでの使用
ブロック パラメーター: alpha_ini |
| 型: 文字ベクトル |
値: '0' | スカラー |
既定: '0' |
平面地球基準座標系におけるボディの初期位置。2 要素ベクトルとして指定されます。
プログラムでの使用
ブロック パラメーター: pos_ini |
| 型: 文字ベクトル |
値: '[0 0]' | 2要素ベクトル |
既定: '[0 0]' |
剛体の初期質量。スカラーとして指定します。
プログラムでの使用
ブロック パラメーター: mass |
| 型: 文字ベクトル |
値: '1.0' | スカラー |
既定: '1.0' |
スカラーとして指定されたボディの慣性。
依存関係
このパラメーターを有効にするには、質量タイプ を Fixed に設定します。
プログラムでの使用
ブロック パラメーター: Iyy |
| 型: 文字ベクトル |
値: '1.0' | スカラー |
既定: '1.0' |
重力源、次のように指定されます:
External | ブロックへの可変重力入力 |
Internal | マスクに指定された一定の重力 |
プログラムでの使用
ブロック パラメーター: g_in |
| 型: 文字ベクトル |
値: 'Internal' | 'External' |
既定: 'Internal' |
重力による加速度。double スカラーとして指定され、内部重力源が選択されている場合に使用されます。シミュレーションで重力を無視する場合は、この値を 0 に設定できます。
依存関係
このパラメーターを有効にするには、重力源 を
内部に設定します。
プログラムでの使用
ブロック パラメーター: g |
| 型: 文字ベクトル |
値: '9.81' | スカラー |
既定: '9.81' |
平面地球フレーム出力ポートに慣性加速度を追加するには、このチェックボックスをオンにします。通常、この信号を加速度計に接続します。
依存関係
AxeAze ポートを有効にするには、このパラメーターを選択します。
プログラムでの使用
ブロック パラメーター: abi_flag |
| 型: 文字ベクトル |
値: 'off' | 'on' |
既定: 'off' |
状態属性
各状態に固有名を割り当てます。線形化中にブロック パスの代わりに状態名を使用できます。
名前の数は、各項目に示されている状態数と一致するか、空である必要があります。ブロック状態をすべて設定するか、まったく設定しません。
単一変数の状態に名前を割り当てるには、
'q'や"q"のように、引用符で囲んだ一意の名前を入力します。2 つの変数の状態に名前を割り当てるには、中括弧で囲まれたコンマ区切りのリストを入力します (例:
{'Xe','Ze'})。状態パラメーターが空 (
' ') の場合、名前は割り当てられません。MATLAB® ワークスペース内の変数を状態名に割り当てる場合は、引用符なしで変数を入力します。変数は、文字ベクトル、文字ベクトルのセル配列、または文字列にすることができます。
速度状態名。中括弧で囲まれたコンマ区切りのリストとして指定します。
プログラムでの使用
ブロック パラメーター: vel_statename |
| 型: 文字ベクトル |
値: '' | 中括弧で囲まれたコンマ区切りのリスト |
既定: '' |
位置状態名。中括弧で囲まれたコンマ区切りのリストとして指定します。
プログラムでの使用
ブロック パラメーター: pos_statename |
| 型: 文字ベクトル |
値: '' | 中括弧で囲まれたコンマ区切りのリスト |
既定: '' |
ピッチ角速度の状態名。文字ベクトルまたは文字列として指定します。
プログラムでの使用
ブロック パラメーター: q_statename |
| 型: 文字ベクトル | string |
値: '' | スカラー |
既定: '' |
ピッチ姿勢状態名。文字ベクトルまたは文字列として指定します。
プログラムでの使用
ブロック パラメーター: theta_statename |
| 型: 文字ベクトル | string |
値: '' |
既定: '' |
アルゴリズム
このブロックは、平面地球基準座標系を中心としたボディ固定座標系の垂直面内での回転を考慮します。
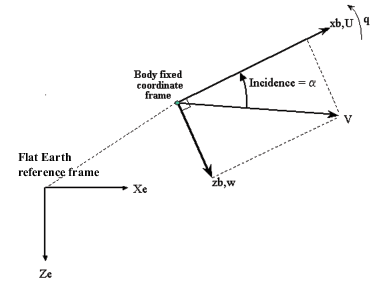
運動方程式は
ここで、加えられた力はボディの重心に作用すると仮定されます。入力変数は Fx、Fz、My です。g はオプションの入力変数です。
拡張機能
C/C++ コード生成
Simulink® Coder™ を使用して C および C++ コードを生成します。
バージョン履歴
R2006a で導入3DOF運動方程式が更新されました。R2021b より前に作成され、3DOF運動方程式ブロックを含む既存のモデルは引き続き実行されます。3DOF 運動方程式ブロックの R2021b より前のバージョンを R2021b 以降のバージョンに置き換えると、更新されたモデルで代数ループが発生する傾向が高くなる可能性があります。ユニット遅延を使用して代数ループを削除する方法の例については、代数ループの削除 を参照してください。代数ループの詳細については、「モデル内の代数ループの識別」を参照してください。
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Web サイトの選択
Web サイトを選択すると、翻訳されたコンテンツにアクセスし、地域のイベントやサービスを確認できます。現在の位置情報に基づき、次のサイトの選択を推奨します:
また、以下のリストから Web サイトを選択することもできます。
最適なサイトパフォーマンスの取得方法
中国のサイト (中国語または英語) を選択することで、最適なサイトパフォーマンスが得られます。その他の国の MathWorks のサイトは、お客様の地域からのアクセスが最適化されていません。
南北アメリカ
- América Latina (Español)
- Canada (English)
- United States (English)
ヨーロッパ
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)