opticalFlowLKDoG
Lucas-Kanade ガウス導関数法を使用してオプティカル フローを推定するためのオブジェクト
説明
Lucas-Kanade ガウス導関数 (DoG) 法を使用して、移動するオブジェクトの方向と速度を推定するためのオプティカル フロー オブジェクトを作成します。estimateFlow オブジェクト関数を使用して、オプティカル フロー ベクトルを推定します。reset オブジェクト関数を使用すると、オプティカル フロー オブジェクトの内部状態をリセットできます。
作成
説明
opticFlow = opticalFlowLKDoG
opticFlow = opticalFlowLKDoG(Name,Value)Name,Value ペアの引数を 1 つ以上指定したプロパティを使用してオプティカル フロー オブジェクトを返します。指定していないプロパティはすべて既定値になります。各プロパティ名を引用符で囲みます。
例: opticalFlowLKDoG('NumFrames',3)
プロパティ
オブジェクト関数
estimateFlow | オプティカル フローの推定 |
reset | Reset the internal state of the optical flow estimation object |
例
ビデオ ファイルを読み取ります。読み取るフレームのタイムスタンプを指定します。
vidReader = VideoReader('visiontraffic.avi',CurrentTime=11);Lucas-Kanade DoG 法を使用してオプティカル フローを推定するオプティカル フロー オブジェクトを作成します。ノイズ除去のしきい値を指定します。出力は、オプティカル フロー推定法とそのプロパティを指定するオプティカル フロー オブジェクトです。
opticFlow = opticalFlowLKDoG(NoiseThreshold=0.0005)
opticFlow =
opticalFlowLKDoG with properties:
NumFrames: 3
ImageFilterSigma: 1.5000
GradientFilterSigma: 1
NoiseThreshold: 5.0000e-04
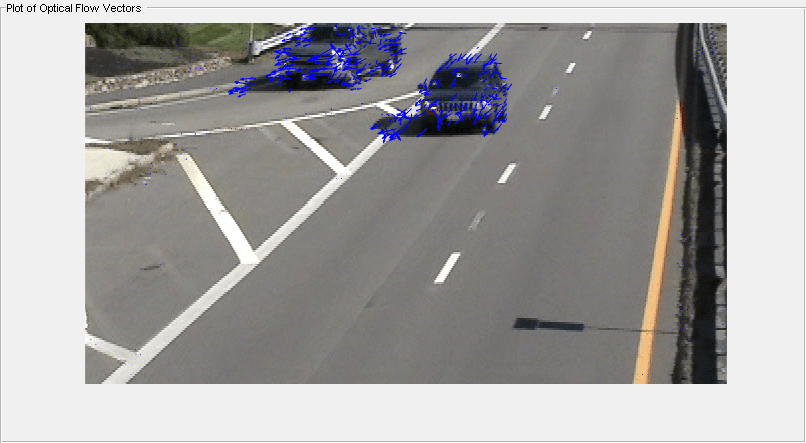
カスタム Figure ウィンドウを作成して、オプティカル フロー ベクトルを可視化します。
h = figure;
movegui(h);
hViewPanel = uipanel(h,Position=[0 0 1 1],Title="Plot of Optical Flow Vectors");
hPlot = axes(hViewPanel);イメージ フレームを読み取って、グレースケール イメージに変換します。連続するイメージ フレームからオプティカル フローを推定します。現在のイメージ フレームを表示して、オプティカル フロー ベクトルを矢印プロットとしてプロットします。
while hasFrame(vidReader) frameRGB = readFrame(vidReader); frameGray = im2gray(frameRGB); flow = estimateFlow(opticFlow,frameGray); imshow(frameRGB) hold on plot(flow,DecimationFactor=[5 5],ScaleFactor=5,Parent=hPlot); hold off pause(10^-3) end

アルゴリズム
参照
[1] Barron, J. L., D. J. Fleet, S. S. Beauchemin, and T. A. Burkitt. “ Performance of optical flow techniques.” In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR),236-242. Champaign, IL: CVPR, 1992.
拡張機能
バージョン履歴
R2015a で導入