Dynamic Steering
(削除済み) アッカーマン ステアリング機構、ラックアンドピニオン ステアリング機構、およびパラレル ステアリング機構の動的なステアリング
Dynamic Steering は削除されました。代わりに、Steering System を使用してください。詳細については、バージョン履歴を参照してください。
ライブラリ:
Vehicle Dynamics Blockset /
Steering
説明
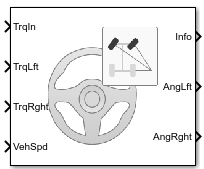
Dynamic Steering ブロックは、アッカーマン ステアリング機構、ラックアンドピニオン ステアリング機構、およびパラレル ステアリング機構の車輪の角度を計算するための動的なステアリングを実装します。このブロックは、ステアリング ホイールの入力トルク、右車輪のトルク、および左車輪のトルクを使用して車輪の角度を計算します。このブロックは車両座標系を使用します。
[パワー アシスト] を選択すると、車両速度とステアリング ホイールの入力トルクの関数である、トルク アシストのルックアップ テーブルを指定できます。このブロックは、ステアリング ホイールの入力トルクとトルク アシストを使用してステアリング運動を計算します。
ステアリング タイプを指定するには、[タイプ] パラメーターを使用します。
| 設定 | ブロック実装 |
|---|---|
| 理想的なアッカーマン ステアリング。車輪の角度の旋回円中心が共通しています。 |
| 理想的なラックアンドピニオン ステアリング。ギアはステアリングの回転を線形運動に変換します。 |
| パラレル ステアリング。車輪の角度は等しくなります。 |
ステアリング機構のデータのタイプを指定するには、[パラメーター化の基準] パラメーターを使用します。
| 設定 | ブロック実装 |
|---|---|
| ステアリング機構では定数パラメーター データが使用されます。 |
| ステアリング機構ではパラメーター データのテーブルが実装されます。 |
[ステアリング車軸] パラメーターを使用して、前車軸と後車軸のいずれをステアリングするかを指定します。
| 設定 | 実装 |
|---|---|
| フロント | 前車軸のステアリング |
| リア | 後車軸のステアリング |
運動
ステアリング運動を計算するために、Dynamic Steering ブロックはステアリング ホイール、シャフト、ステアリング機構、ヒステリシス、オプションでパワー アシストをモデル化します。
| 計算 | 式 |
|---|---|
ステアリング コラムおよびステアリング シャフトの運動 |
|
ヒステリシス バネ ダンパー |
|
オプションのパワー アシスト |
|
図と方程式では次の変数を使用しています。
| J1 | ステアリング ホイールの慣性 |
| J2 | ステアリング機構の慣性 |
ステアリング ホイールの角度、角速度、および角加速度 | |
シャフト角度、角速度、および角加速度 | |
| b1, k1 | ヒステリシス バネおよび粘性減衰係数 |
| b2 | ステアリング ホイールの粘性減衰係数 |
| b3 | ステアリング機構の減衰係数 |
| τhys | ヒステリシス バネの減衰トルク |
| τfric | ステアリング機構の摩擦トルク |
| τeq | 車輪の等価トルク |
| τast | トルク アシスト |
| βu , βl | 上限ヒステリシス修飾子と下限ヒステリシス修飾子 |
| v | 車両速度 |
| ƒtrq | トルク アシストのルックアップ テーブル |
ステアリング タイプ
100% の (理想的な) アッカーマン ステアリングでは、すべての車輪が、同じ中心点をもつ円弧を追従します。
車輪のステアリング角度を計算するために、Steering System ブロックは次の方程式を使用します。
次の表は、方程式で使用される変数を定義しています。
| δin | ピニオン角度 (ピニオンへのステアリング シャフトの角度) |
| δL | 左車輪ステアリング角度 |
| δR | 右車輪ステアリング角度 |
| δAck | アッカーマン ステアリング角度 |
| TW | トラック幅 |
| WB | ホイール ベース |
| γ | ステアリング比: アッカーマン角度に対するピニオン角度の比率 |
ラックアンドピニオン ステアリングでは、ピニオン回転でラックの線形運動が発生し、タイ ロッドとステアリング アームを介して車輪を操縦します。
車輪のステアリング角度を計算するために、このブロックは次の方程式を使用します。
図と方程式では次の変数を使用しています。
| δin | ピニオン角度 (ピニオンへのステアリング シャフトの角度) |
| δL | 左車輪ステアリング角度 |
| δR | 右車輪ステアリング角度 |
| TW | トラック幅 |
| r | ピニオン半径 |
| ΔP | "直進" 位置からのラック位置の線形変化 |
| D | ラックとステアリング車軸間の縦方向の距離 |
| lrack | ラックの長さ (内側のタイロッド エンド間の距離) |
| larm | ステアリング アームの長さ |
| lrod | タイ ロッドの長さ |
パラレル ステアリングでは、車輪の角度は等しくなります。
ステアリング角度を計算するために、このブロックでは次の方程式を使用します。
図と方程式では次の変数を使用しています。
| δin | ステアリング ホイールの角度 |
| δL | 左車輪角度 |
| δR | 右車輪角度 |
| γ | ステアリング比 |
例

ダブル レーン チェンジ リファレンス アプリケーション
ダブル レーン チェンジ操縦の ISO 3888-2 規格における車両運動モデル全体をシミュレート。車両運動の走行およびハンドリング解析やシャシー制御開発で、ヨー安定性や横方向加速度の制限などに使用。
端子
入力
出力
パラメーター
参照
[1] Crolla, David, David Foster, et al. Encyclopedia of Automotive Engineering. Volume 4, Part 5 (Chassis Systems) and Part 6 (Electrical and Electronic Systems). Chichester, West Sussex, United Kingdom: John Wiley & Sons Ltd, 2015.
[2] Gillespie, Thomas. Fundamentals of Vehicle Dynamics. Warrendale, PA: Society of Automotive Engineers, 1992.
[3] Vehicle Dynamics Standards Committee. Vehicle Dynamics Terminology. SAE J670. Warrendale, PA: Society of Automotive Engineers, 2008.