setCoveragePattern
Description
setCoveragePattern(
sets the angle at which the UAV sweeps the polygon with the index space,index,SweepAngle=angle)index
in coverage space space to angle angle.
Use the show function to
visualize the polygons in the coverage space to identify which polygon index to use.
Note
space must contain at least one polygon.
Examples
This example shows how to plan a coverage path that surveys the parking lots of the MathWorks Lakeside campus.
Get the geodetic coordinates for the MathWorks Lakeside campus, then create the limits for our map.
mwLS = [42.3013 -71.375 0]; latlim = [mwLS(1)-0.003 mwLS(1)+0.003]; lonlim = [mwLS(2)-0.003 mwLS(2)+0.003];
Create a figure containing the map with the longitude and latitude limits.
fig = figure;
g = geoaxes(fig,Basemap="satellite");
geolimits(latlim,lonlim)Get the outline of the first parking lot in longitude and latitude coordinates. Then create the polygon by concatenating them.
pl1lat = [42.3028 42.30325 42.3027 42.3017 42.3019]'; pl1lon = [-71.37527 -71.37442 -71.3736 -71.37378 -71.375234]'; pl1Poly = [pl1lat pl1lon];
Repeat the process for the second parking lot.
pl2lat = [42.30035 42.2999 42.2996 42.2999]'; pl2lon = [-71.3762 -71.3734 -71.37376 -71.37589]'; pl2poly = [pl2lat pl2lon];
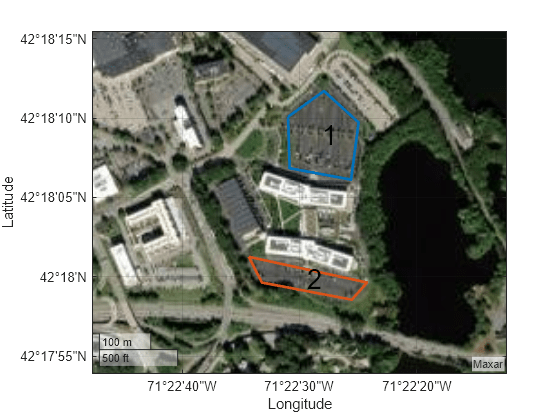
Create the coverage space with both polygons, and specify these properties:
Waypoints coordinates format: Geodetic
Reference location: MathWorks Lakeside campus location
Reference height: 25 meters
Width of sensor footprint: 20 meters
cs = uavCoverageSpace(Polygons={pl1Poly,pl2poly},UseLocalCoordinates=false,...
ReferenceLocation=mwLS,ReferenceHeight=25,UnitWidth=20);Show the coverage space on the map.
show(cs,Parent=g);
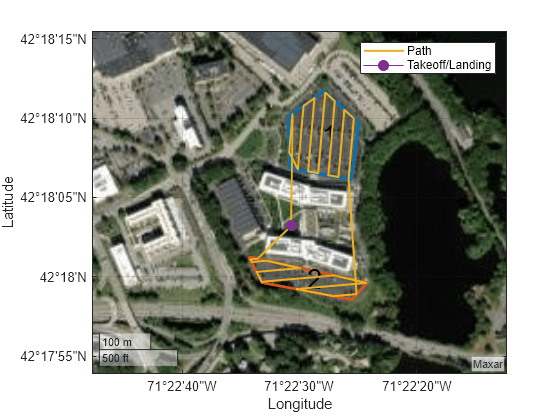
Set the sweep angle for polygons 1 and 2 to 85 and 5 degrees, respectively, to have paths that are parallel to the roads in the parking lots. Then create the coverage planner for that coverage space with the exhaustive solver algorithm.
setCoveragePattern(cs,1,SweepAngle=85)
setCoveragePattern(cs,2,SweepAngle=5)
cp = uavCoveragePlanner(cs,Solver="Exhaustive");Set the takeoff position to a location in the courtyard, then plan the coverage path.
takeoff = [42.30089 -71.3752, 0]; [wp,soln] = plan(cp,takeoff); hold on geoplot(wp(:,1),wp(:,2),LineWidth=1.5); geoplot(takeoff(1),takeoff(2),MarkerSize=25,Marker=".") legend("","","Path","Takeoff/Landing") hold off