insSensor
慣性ナビゲーション システムと GNSS/GPS のシミュレーション モデル
説明
insSensor System object™ は、慣性航法システム (INS) および GPS などの全地球航法衛星システム (GNSS) からの測定値を融合し、融合した測定値を出力するデバイスをモデル化します。
融合した INS および GNSS の測定値を出力するには、以下のようにします。
insSensorオブジェクトを作成して、そのプロパティを設定します。関数と同様に、引数を指定してオブジェクトを呼び出します。
System object の機能の詳細については、System object とはを参照してください。
作成
プロパティ
使用法
説明
measurement = INS(gTruth)gTruth に基づきます。
measurement = INS(gTruth,simTime)simTime を指定します。この構文を有効にするには、TimeInput プロパティを true に設定します。
入力引数
出力引数
オブジェクト関数
オブジェクト関数を使用するには、System object を最初の入力引数として指定します。たとえば、obj という名前の System object のシステム リソースを解放するには、以下の構文を使用します。
release(obj)
例
ローカルの北-東-下 (NED) の原点で静止位置を定義する運動構造体を作成します。プラットフォームは静止しているため、定義する必要があるサンプルは 1 つだけです。グラウンド トゥルースの運動が 100 Hz のサンプル レートで 10 秒間サンプリングされたとします。既定の insSensor System object™ を作成します。insSensor オブジェクトからの出力を保持する変数を事前に割り当てます。
Fs = 100; duration = 10; numSamples = Fs*duration; motion = struct( ... 'Position',zeros(1,3), ... 'Velocity',zeros(1,3), ... 'Orientation',ones(1,1,'quaternion')); INS = insSensor; positionMeasurements = zeros(numSamples,3); velocityMeasurements = zeros(numSamples,3); orientationMeasurements = zeros(numSamples,1,'quaternion');
ループ内で、静止運動構造体を使用して INS を呼び出し、ローカル NED 座標系における位置、速度、および方向の測定値を返します。位置、速度、および方向の測定値を記録します。
for i = 1:numSamples measurements = INS(motion); positionMeasurements(i,:) = measurements.Position; velocityMeasurements(i,:) = measurements.Velocity; orientationMeasurements(i) = measurements.Orientation; end
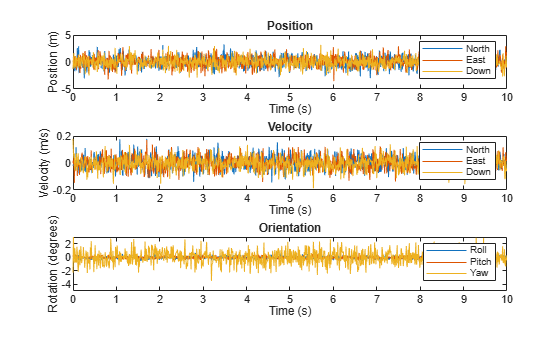
可視化のために方向を四元数からオイラー角に変換します。位置、速度、および方向の測定値を経時的にプロットします。
orientationMeasurements = eulerd(orientationMeasurements,'XYZ','frame'); t = (0:(numSamples-1))/Fs; subplot(3,1,1) plot(t,positionMeasurements) title('Position') xlabel('Time (s)') ylabel('Position (m)') legend('North','East','Down') subplot(3,1,2) plot(t,velocityMeasurements) title('Velocity') xlabel('Time (s)') ylabel('Velocity (m/s)') legend('North','East','Down') subplot(3,1,3) plot(t,orientationMeasurements) title('Orientation') xlabel('Time (s)') ylabel('Rotation (degrees)') legend('Roll', 'Pitch', 'Yaw')
insSensor System object™ を使用して INS 測定値を生成します。waypointTrajectory を使用してグラウンド トゥルース パスを生成します。
北に位置合わせされたセンサー ボディの "x" 軸で開始し、東に位置合わせされたセンサー ボディの "x" 軸で終了するグラウンド トゥルースの方向を指定します。弧の軌跡のウェイポイントと、対応するウェイポイントの到着時間ベクトルを指定します。100 Hz のサンプル レートを使用します。ウェイポイント制約を指定して waypointTrajectory System object を作成し、軌跡全体が 1 回の呼び出しで出力されるように SamplesPerFrame を設定します。
eulerAngles = [0,0,0; ... 0,0,0; ... 90,0,0; ... 90,0,0]; orientation = quaternion(eulerAngles,'eulerd','ZYX','frame'); r = 20; waypoints = [0,0,0; ... 100,0,0; ... 100+r,r,0; ... 100+r,100+r,0]; toa = [0,10,10+(2*pi*r/4),20+(2*pi*r/4)]; Fs = 100; numSamples = floor(Fs*toa(end)); path = waypointTrajectory('Waypoints',waypoints, ... 'TimeOfArrival',toa, ... 'Orientation',orientation, ... 'SampleRate',Fs, ... 'SamplesPerFrame',numSamples);
INS データの受信をモデル化するために insSensor System object を作成します。PositionAccuracy を 0.1 に設定します。
ins = insSensor('PositionAccuracy',0.1);ウェイポイント軌跡オブジェクト path を呼び出して、グラウンド トゥルース運動を生成します。グラウンド トゥルース動作を指定して INS シミュレーター ins を呼び出して、INS 測定値を生成します。
[motion.Position,motion.Orientation,motion.Velocity] = path(); insMeas = ins(motion);
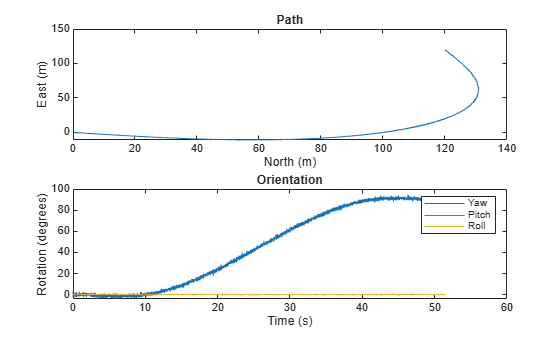
可視化のために、ins から返された方向を度単位のオイラー角に変換します。完全なパスと方向を経時的にプロットします。
orientationMeasurementEuler = eulerd(insMeas.Orientation,'ZYX','frame'); subplot(2,1,1) plot(insMeas.Position(:,1),insMeas.Position(:,2)); title('Path') xlabel('North (m)') ylabel('East (m)') subplot(2,1,2) t = (0:(numSamples-1)).'/Fs; plot(t,orientationMeasurementEuler(:,1), ... t,orientationMeasurementEuler(:,2), ... t,orientationMeasurementEuler(:,3)); title('Orientation') legend('Yaw','Pitch','Roll') xlabel('Time (s)') ylabel('Rotation (degrees)')
拡張機能
バージョン履歴
R2020b で導入