RegressionTree Predict ブロックの使用による応答の予測
この例では、RegressionTree Predictブロックを Simulink® の応答予測に使用する方法を示します。このブロックは、観測値 (予測子データ) を受け入れて、学習済みの回帰木モデルを使用することにより、その観測値の予測された応答を返します。
回帰モデルの学習
carbig データ セットを読み込みます。このデータ セットには、1970 年代と 1980 年代初期に製造された自動車の測定値が格納されています。予測子変数を格納する行列と応答変数のベクトルを作成します。
load carbig
X = [Acceleration,Cylinders,Displacement,Horsepower,Model_Year,Weight];
Y = MPG;回帰木モデルの学習を行います。
treeMdl = fitrtree(X,Y);
treeMdl はRegressionTreeモデルです。
Simulink モデルの作成
この例では、RegressionTree Predictブロックを含む Simulink モデル slexCarDataRegressionTreePredictExample.slx が用意されています。この節の説明に従って、この Simulink モデルを開くことも、新しいモデルを作成することもできます。
Simulink モデル slexCarDataRegressionTreePredictExample.slx を開きます。
SimMdlName = 'slexCarDataRegressionTreePredictExample';
open_system(SimMdlName)
Simulink モデルを開くと、Simulink モデルを読み込む前に、ソフトウェアがコールバック関数 PreLoadFcn のコードを実行します。slexCarDataRegressionTreePredictExample のコールバック関数 PreLoadFcn には、学習済みモデルの変数 treeMdl がワークスペースにあるかどうかをチェックするコードが含まれています。ワークスペースに変数がない場合、PreLoadFcn は標本データを読み込み、ツリー モデルに学習させ、Simulink モデルの入力信号を作成します。コールバック関数を表示するには、[モデル化] タブの [設定] セクションで、[モデル設定] をクリックし、[モデル プロパティ] を選択します。次に、[コールバック] タブで、[モデルのコールバック] ペインのコールバック関数 PreLoadFcn を選択します。
新しい Simulink モデルを作成するには、[空のモデル] テンプレートを開き、RegressionTree Predict ブロックを追加します。Inport ブロックと Outport ブロックを追加して、それらを RegressionTree Predict ブロックに接続します。
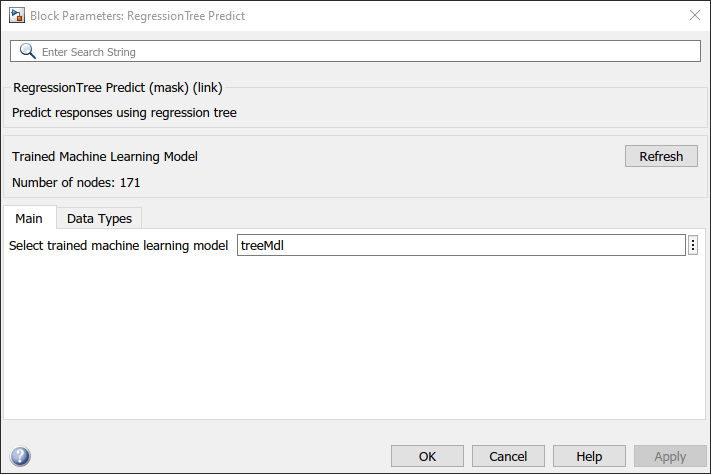
RegressionTree Predict ブロックをダブルクリックして、[ブロック パラメーター] ダイアログ ボックスを開きます。学習済みのツリー モデルを含むワークスペース変数の名前を指定できます。既定の変数名は treeMdl です。[リフレッシュ] ボタンをクリックします。ダイアログ ボックスの [Trained Machine Learning Model] に、ツリー モデル treeMdl の学習に使用されるオプションが表示されます。
RegressionTree Predict ブロックには、6 個の予測子の値を含む観測値が必要です。Inport ブロックをダブルクリックし、[信号属性] タブで [端子の次元] を 6 に設定します。
Simulink モデルの構造体配列の形式で、入力信号を作成します。構造体配列には、次のフィールドが含まれていなければなりません。
time— 観測値がモデルに入力された時点。方向は予測子データ内の観測値に対応しなければなりません。したがって、この例の場合はtimeが列ベクトルでなければなりません。signals—valuesフィールドとdimensionsフィールドが含まれている、入力データを説明する 1 行 1 列の構造体配列。valuesは予測子データの行列、dimensionsは予測子変数の個数です。
carsmall データ セットから、slexCarDataRegressionTreePredictExample モデルに適切な構造体配列を作成します。
load carsmall
testX = [Acceleration,Cylinders,Displacement,Horsepower,Model_Year,Weight];
testX = rmmissing(testX);
carsmallInput.time = (0:size(testX,1)-1)';
carsmallInput.signals(1).values = testX;
carsmallInput.signals(1).dimensions = size(testX,2);ワークスペースから信号データをインポートするには、次を実行します。
[コンフィギュレーション パラメーター] ダイアログ ボックスを開く。[モデル化] タブで、[モデル設定] をクリック。
[データのインポート/エクスポート] ペインで [入力] チェック ボックスをオンにし、隣のテキスト ボックスに
carsmallInputと入力。[ソルバー] ペインの [シミュレーション時間] で、[終了時間] を
carsmallInput.time(end)に設定。[ソルバーの選択] で、[タイプ] をFixed-stepに、[ソルバー] をdiscrete (no continuous states)に設定。
詳細は、シミュレーションのための信号データの読み込み (Simulink)を参照してください。
モデルをシミュレートします。
sim(SimMdlName);
Inport ブロックでは、観測値を検出すると、その観測値を RegressionTree Predict ブロックに送ります。シミュレーション データ インスペクター (Simulink)を使用して、Outport ブロックのログ データを表示できます。