このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
incrementalConceptDriftDetector
構文
説明
IncCDDetector = incrementalConceptDriftDetector()
IncCDDetector = incrementalConceptDriftDetector(DetectionMethod)DetectionMethod の手法を使用するインクリメンタルな概念ドリフト検出器を返します。
IncCDDetector = incrementalConceptDriftDetector(DetectionMethod,Name=Value)Name=Value の引数を使用して追加のオプションを指定します。
例
ドリフト検出法 (DDM) を使用して概念ドリフト検出器を開始します。
incCDDetector = incrementalConceptDriftDetector("ddm");最初の 1000 個の観測値は故障率が 0.1 で、1000 個の観測値をすぎると故障率が 0.6 に増加する乱数ストリームを作成します。
rng(1234) % For reproducibility numObservations = 3000; switchPeriod = 1000; for i = 1:numObservations if i <= switchPeriod failurerate = 0.1; else failurerate = 0.6; end X(i) = rand()<failurerate; % Value 1 represents failure end
ドリフト ステータスを追跡する変数を事前に割り当てます。
status = zeros(numObservations,1); statusname = strings(numObservations,1);
ドリフト検出器にデータを継続的に供給し、インクリメンタルなドリフト検出を実行します。各反復で次を行います。
ドリフト検出器の統計量を更新し、
detectdriftで新しいデータ点を使用してドリフトを監視する。(メモ:detectdriftはウォームアップ期間後にドリフトをチェック)可視化のためにドリフト ステータスを追跡して記録する。
ドリフトが検出されたら、
resetを使用してインクリメンタルな概念ドリフト検出器をリセットする。
for i = 1:numObservations incCDDetector = detectdrift(incCDDetector,X(i)); statusname(i) = string(incCDDetector.DriftStatus); if incCDDetector.DriftDetected status(i) = 2; incCDDetector = reset(incCDDetector); % If drift detected, reset the detector sprintf("Drift detected at Observation #%d. Detector reset.",i) elseif incCDDetector.WarningDetected status(i) = 1; else status(i) = 0; end end
ans = "Drift detected at Observation #1078. Detector reset."
観測番号 1000 で故障率が変わった後、detectdrift は観測番号 1078 でシフトを検出します。
ドリフト ステータスと観測番号の関係をプロットします。
gscatter(1:numObservations,status,statusname,'gyr','*',4,'on',"Observation number","Drift status")

標準偏差が 0.75 で、平均は時間と共に変化する正規分布から観測値が派生する乱数ストリームを作成します。最初の 1000 個の観測値は平均 2 の分布から派生し、次の 1000 個は平均 4 の分布から派生し、その後の 1000 個は平均 7 の分布から派生します。
rng(1234) % For reproducibility numObservations = 3000; switchPeriod1 = 1000; switchPeriod2 = 2000; X = zeros([numObservations 1]); % Generate the data for i = 1:numObservations if i <= switchPeriod1 X(i) = normrnd(2,0.75); elseif i <= switchPeriod2 X(i) = normrnd(4,0.75); else X(i) = normrnd(7,0.75); end end
インクリメンタルなドリフト検出の用途では、データ ストリームへのアクセスとモデルの更新が連続的に発生します。データを先に収集してからモデルに供給することはありません。ただし、この例では、明確にするためにデータのシミュレーションを分けて説明します。
ドリフトのウォームアップ期間を 50 個の観測値に指定し、データ入力範囲の推定期間を 100 個に指定します。
driftWarmupPeriod = 50; estimationPeriod = 100;
インクリメンタルな概念ドリフト検出器を開始します。指数加重移動平均法 (EWMA) による Hoeffding 境界の手法を使用します。入力タイプとウォームアップ期間を指定します。
incCDDetector = incrementalConceptDriftDetector("hddmw",InputType="continuous", ... WarmupPeriod=driftWarmupPeriod,EstimationPeriod=estimationPeriod)
incCDDetector =
HoeffdingDriftDetectionMethod
PreviousDriftStatus: 'Stable'
DriftStatus: 'Stable'
IsWarm: 0
NumTrainingObservations: 0
Alternative: 'greater'
InputType: 'continuous'
TestMethod: 'ewma'
Properties, Methods
incDDetector は、HoeffdingDriftDetectionMethod オブジェクトです。最初にオブジェクトを作成した時点では、DriftStatus、IsWarm、CutMean、NumTrainingObservations などのプロパティは初期状態になります。detectdrift は、それらをデータの供給に応じてインクリメンタルに更新し、ドリフトを監視します。
バッチ サイズ、およびドリフト ステータスと平均 (データが入力されるたびにドリフト検出器で計算) を記録する変数を事前に割り当てます。
status = zeros([numObservations 1]); statusname = strings([numObservations 1]); M = zeros([numObservations 1]);
観測値を一度に 1 個ずつ処理してデータ ストリームをシミュレートし、インクリメンタルなドリフト検出を実行します。各反復で次を行います。
detectdriftで新しいデータを使用してドリフトを監視する。可視化のためにドリフト ステータスと統計量を追跡して記録する。
ドリフトが検出されたら、関数
resetを使用してインクリメンタルな概念ドリフト検出器をリセットする。
for i = 1:numObservations incCDDetector = detectdrift(incCDDetector,X(i)); M(i) = incCDDetector.Mean; if incCDDetector.DriftDetected status(i) = 2; statusname(i) = string(incCDDetector.DriftStatus); incCDDetector = reset(incCDDetector); % If drift detected, reset the detector sprintf("Drift detected at observation #%d. Detector reset.",i) elseif incCDDetector.WarningDetected status(i) = 1; statusname(i) = string(incCDDetector.DriftStatus); sprintf("Warning detected at observation #%d.",i) else status(i) = 0; statusname(i) = string(incCDDetector.DriftStatus); end end
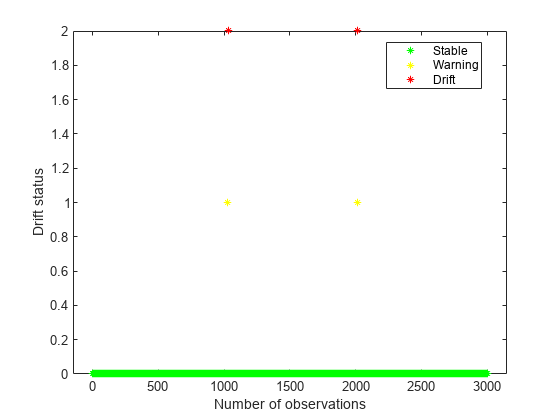
ans = "Warning detected at observation #1024."
ans = "Warning detected at observation #1025."
ans = "Warning detected at observation #1026."
ans = "Warning detected at observation #1027."
ans = "Warning detected at observation #1028."
ans = "Warning detected at observation #1029."
ans = "Drift detected at observation #1030. Detector reset."
ans = "Warning detected at observation #2012."
ans = "Warning detected at observation #2013."
ans = "Warning detected at observation #2014."
ans = "Drift detected at observation #2015. Detector reset."
ドリフト ステータスと観測番号の関係をプロットします。
gscatter(1:numObservations,status,statusname,'gyr','*',5,'on',"Number of observations","Drift status")
平均値と観測値の数の関係をプロットします。
scatter(1:numObservations,M)

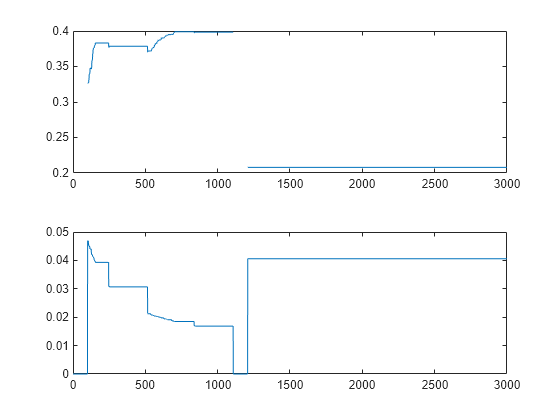
このプロットから、標本平均が増加していることがわかります。平均値が大きくなり、最終的にソフトウェアによってデータのドリフトが検出されます。ドリフトが検出されたら、インクリメンタルなドリフト検出器をリセットします。これにより、平均値もリセットされます。プロットの標本平均がゼロである観測値は推定期間に対応します。推定期間は、最初に 1 回とドリフト検出後のドリフト検出器のリセットの後に 2 回あります。
ドリフト検出法 (DDM) を使用して概念ドリフト検出器を開始します。
incCDDetector = incrementalConceptDriftDetector("ddm",Alternative="less",WarmupPeriod=100);
最初の 1000 個の観測値は故障率が 0.4 で、1000 個をすぎると故障率が 0.1 に減少する乱数ストリームを作成します。
rng(1234) % For reproducibility numObservations = 3000; switchPeriod = 1000; for i = 1:numObservations if i <= switchPeriod failurerate = 0.4; else failurerate = 0.125; end X(i) = rand()<failurerate; % Value 1 represents failure end
ドリフト ステータスと最適な平均値および最適な標準偏差値を追跡する変数を事前に割り当てます。
optmean = zeros(numObservations,1); optstddev = zeros(numObservations,1); status = zeros(numObservations,1); statusname = strings(numObservations,1);
ドリフト検出器にデータを継続的に供給し、潜在的な変化を監視します。可視化のためにドリフト ステータスを記録します。
for i = 1:numObservations incCDDetector = detectdrift(incCDDetector,X(i)); statusname(i) = string(incCDDetector.DriftStatus); optmean(i) = incCDDetector.OptimalMean; optstddev(i) = incCDDetector.OptimalStandardDeviation; if incCDDetector.DriftDetected status(i) = 2; incCDDetector = reset(incCDDetector); % If drift detected, reset the detector sprintf("Drift detected at Observation #%d. Detector reset.",i) elseif incCDDetector.WarningDetected status(i) = 1; else status(i) = 0; end end
ans = "Drift detected at Observation #1107. Detector reset."
観測番号 1000 で故障率が変わった後、detectdrift は観測番号 1096 でシフトを検出します。
最適な平均と最適な標準偏差の変化をプロットします。
tiledlayout(2,1); ax1 = nexttile; plot(ax1,1:numObservations,optmean) ax2 = nexttile; plot(ax2,1:numObservations,optstddev)
ドリフト ステータスと観測番号の関係をプロットします。
figure(); gscatter(1:numObservations,status,statusname,'gyr','*',4,'on',"Observation number","Drift status")

detectdrift は、複数の観測値を警告ステータスと結論付けてからドリフトと判定しています。
入力引数
名前と値の引数
出力引数
参照
[1] Gama, Joao, Pedro Medas, Gladys Castillo, and Pedro P. Rodrigues. “Learning with drift detection.“ In Brazilian symposium on artificial intelligence, pp. 286-295. Berlin, Heidelberg: Springer. 2004, September.
[2] Frias-Blanco, Isvani, Jose del Campo-Ávila, Ramos-Jimenez Gonzalo, Rafael Morales-Bueno, Augustin Ortiz-Diaz, and Yaile Caballero-Mota. “Online and non-parametric drift detection methods based on Hoeffding's bounds.“ IEEE Transactions on Knowledge and Data Engineering, Vol. 27, No. 3, pp.810-823. 2014.
バージョン履歴
R2022a で導入