detectdrift
構文
説明
IncCDDetector = detectdrift(IncCDDetector,X)X の新しいデータで更新し、変更された検出器 IncCDDetector を返します。
detectdrift は、IsWarm プロパティが true (または 1) の場合にのみドリフト ステータスを更新します。
IncCDDetector = detectdrift(IncCDDetector,X,Weights=W)W の観測値の重みも使用して IncCDDetector を更新します。
引数 Weights はドリフト検出法 (DDM) にのみ使用できます。incrementalConceptDriftDetector の呼び出しで引数 DetectionMethod に "DDM" を指定します。
例
最初の 1000 個の観測値は平均が 2 で標準偏差が 0.75 の正規分布から派生し、次の 1000 個は平均が 4 で標準偏差が 1 の正規分布から派生する乱数ストリームを作成します。インクリメンタルなドリフト検出の用途では、データ ストリームへのアクセスとモデルの更新が連続的に発生します。データを先に収集してからモデルに供給することはありません。ただし、この例では、明確にするためにデータのシミュレーションを分けて説明します。
rng(1234) % For reproducibility numObservations = 3000; switchPeriod1 = 1000; X = zeros([numObservations 1]); for i = 1:numObservations if i <= switchPeriod1 X(i) = normrnd(2,0.75); else X(i) = normrnd(4,1); end end
インクリメンタルな概念ドリフト検出器を開始します。指数移動平均法 (EWMA) による Hoeffding 境界の手法を使用します。入力タイプを連続、ウォームアップを 50 個の観測値、推定期間を 50 個の観測値に指定します。
incCDDetector = incrementalConceptDriftDetector("hddmw",InputType="continuous", ... WarmupPeriod=50,EstimationPeriod=50)
incCDDetector =
HoeffdingDriftDetectionMethod
PreviousDriftStatus: 'Stable'
DriftStatus: 'Stable'
IsWarm: 0
NumTrainingObservations: 0
Alternative: 'greater'
InputType: 'continuous'
TestMethod: 'ewma'
Properties, Methods
incDDetector は、HoeffdingDriftDetectionMethod オブジェクトです。最初にオブジェクトを作成した時点では、DriftStatus、IsWarm、CutMean、NumTrainingObservations などのプロパティは初期状態になります。detectdrift は、それらをデータの供給に応じてインクリメンタルに更新し、ドリフトを監視します。
バッチ サイズ、およびドリフト ステータスと統計を記録する変数を事前に割り当てます。
status = zeros([numObservations 1]); statusname = strings([numObservations 1]);
観測値を一度に 1 個ずつ処理してデータ ストリームをシミュレートし、インクリメンタルなドリフト検出を実行します。各反復で次を行います。
detectdriftで新しいデータを使用してドリフトを監視する。可視化のためにドリフト ステータスを追跡して記録する。
ドリフトが検出されたら、関数
resetを使用してインクリメンタルな概念ドリフト検出器をリセットする。
for i = 1:numObservations incCDDetector = detectdrift(incCDDetector,X(i)); if incCDDetector.DriftDetected status(i) = 2; statusname(i) = string(incCDDetector.DriftStatus); incCDDetector = reset(incCDDetector); % If drift detected, reset the detector sprintf("Drift detected at observation #%d. Detector reset.",i) elseif incCDDetector.WarningDetected status(i) = 1; statusname(i) = string(incCDDetector.DriftStatus); sprintf("Warning detected at observation #%d.",i) else status(i) = 0; statusname(i) = string(incCDDetector.DriftStatus); end end
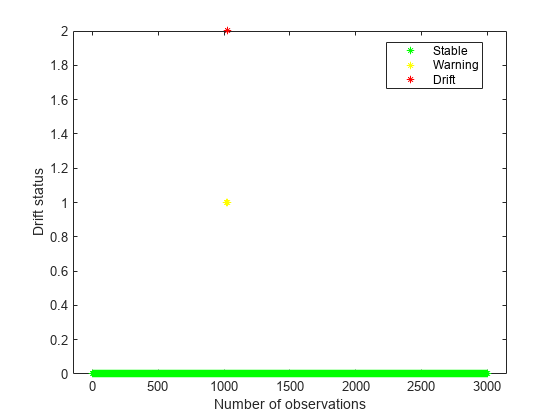
ans = "Warning detected at observation #1019."
ans = "Warning detected at observation #1020."
ans = "Warning detected at observation #1021."
ans = "Warning detected at observation #1022."
ans = "Drift detected at observation #1023. Detector reset."
ドリフト ステータスとデータ観測番号の関係をプロットします。
gscatter(1:numObservations,status,statusname,'gyr','*',5,'on',"Number of observations","Drift status")
入力引数
バージョン履歴
R2022a で導入