このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
航空機の昇降舵の制御システムの故障の検出と分離
この例では、Stateflow チャートを使用して 1 組の航空機の昇降舵の故障検出、分離、回復 (FDIR) のアプリケーションを設計する方法を示します。

一般的な航空機では、機体の両側に 1 基ずつ、2 基の昇降舵が水平尾翼に備え付けられています。航空機の安全性を高めるため、昇降舵の制御システムには以下の冗長な部品が含まれています。
4 つの独立油圧アクチュエータ。各昇降舵には内側と外側のアクチュエータがあります。
アクチュエータを駆動する 3 つの油圧回路。外側のアクチュエータにはそれぞれ専用の油圧回路があります。内側のアクチュエータは 1 つの油圧回路を共有しています。
2 つのプライマリ フライト コントロール ユニット (PFCU)。一方の PFCU が内側のアクチュエータを制御し、もう一方が外側のアクチュエータを制御します。航空機は、故障に応じて PFCU をアクティブまたは非アクティブにします。

航空機が申し分のない高度で飛行していれば、アクチュエータの位置には一定の値が維持されます。故障検出装置は次の場合にアクチュエータの故障を記録します。
アクチュエータの位置がこのゼロ ポイントから 10 cm 上下した場合。
アクチュエータの位置が 0.01 秒で 20 cm 以上変化した場合。
圧力が範囲を外れていたり、急速に変化したりする場合も、故障検出装置によって油圧回路のいずれかが故障と記録されます。この例では、故障検出装置は次をチェックします。
油圧回路内の圧力が 500 kPa ~ 2 MPa の間であること。
圧力の変化が 0.01 秒で 100 kPa を超えないこと。
故障検出、分離、回復システムのモデル化
sf_aircraft モデルは、いくつかのチャートとサブシステムを使用して故障を検出、分離し、その故障から回復します。
故障の検出
モデルの最上位レベルで、Signal Conditioning and Failures サブシステムは故障検出の最初の層を提供します。このサブシステムは、以下の変化率を評価します。
各アクチュエータの位置
各油圧回路の圧力
これらのいずれかのコンポーネントにおける過度の変化率を検出すると、サブシステムは sf_aircraft_controller モデル参照に警告を通知します。
このモデル参照で、Mode Logic サブシステムは故障検出の 2 番目の層を提供します。このサブシステムには、Signal Conditioning and Failures からの信号を Actuator Controller サブシステム内の分離システムと回復システムに対する指示に変換する Stateflow が含まれています。
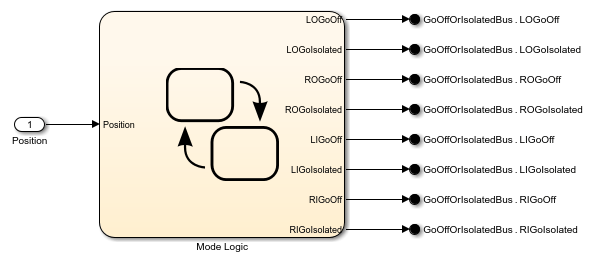
Mode Logic チャートは、指示を boolean 信号としてモデル化します。信号が true の場合、分離システムと回復システムは指示を実行します。
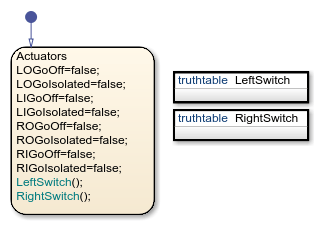
各ステップで、Mode Logic チャートは指示をリセットし、真理値表 LeftSwitch および RightSwitch を使用して新しい値を計算します。
以下のいずれかに当てはまる場合、真理値表はアクチュエータにオフにするよう指示します。
接続された油圧回路のみが故障している。
アクチュエータと接続された油圧回路の両方が故障している。
以下のいずれかに当てはまる場合、真理値表はアクチュエータに分離するよう指示します。
アクチュエータが故障しているが、接続された油圧回路は故障していない。
同じ側にあるアクチュエータが両方故障している。
同じ側にある油圧が両方故障している。
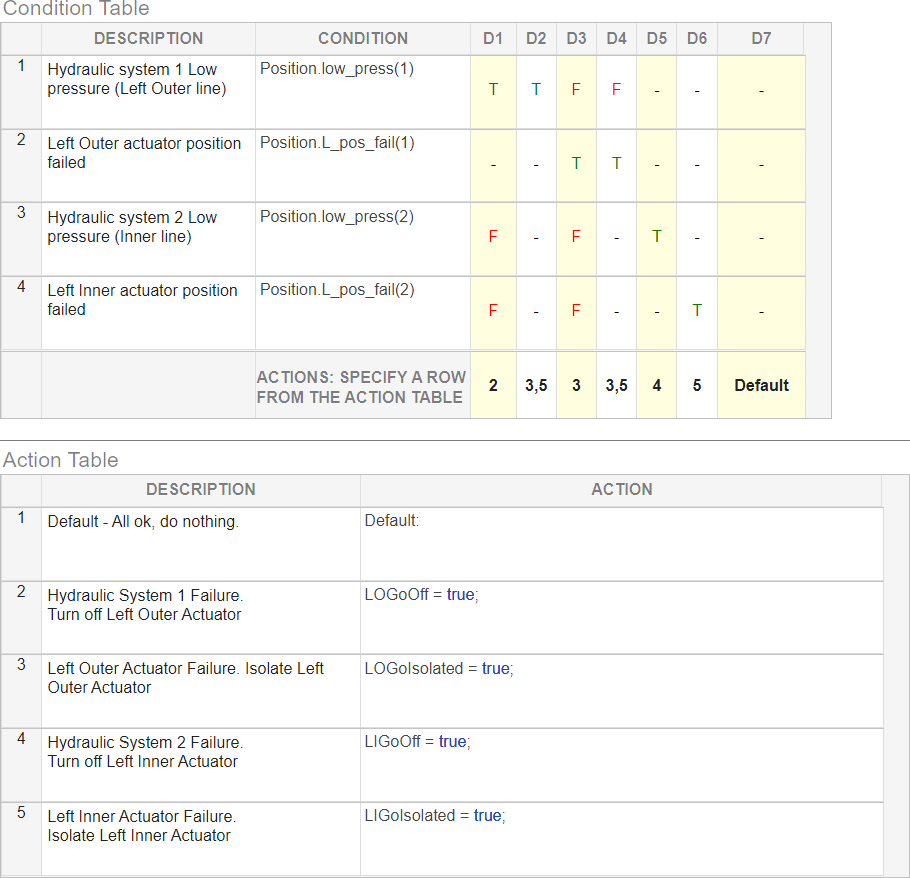
たとえば、LeftSwitch 真理値表の "D1" 列は、最初の油圧回路が故障するとトリガーされます。その後、LOGoOff を true に設定し、分離システムと回復システムに左外側のアクチュエータをオフにするよう指示することで、"アクション テーブル" の 2 行目が実行されます。
故障の分離
sf_aircraft_controller モデル参照で、Actuator Controller サブシステムは、それぞれが各アクチュエータに対応する 4 つのサブシステムを使用して故障の分離と回復をモデル化します。
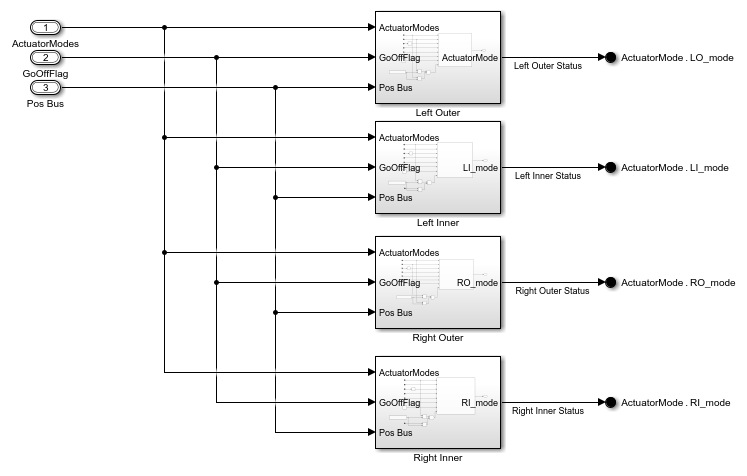
各サブシステムには、ライブラリ sf_aircraft_lib からリンクされているチャートが含まれています。チャートは同一のステートと遷移をもちますが、異なる信号を受信します。たとえば、チャート LeftOuterActuator は、左外側のアクチュエータの故障検出ロジックを定義します。
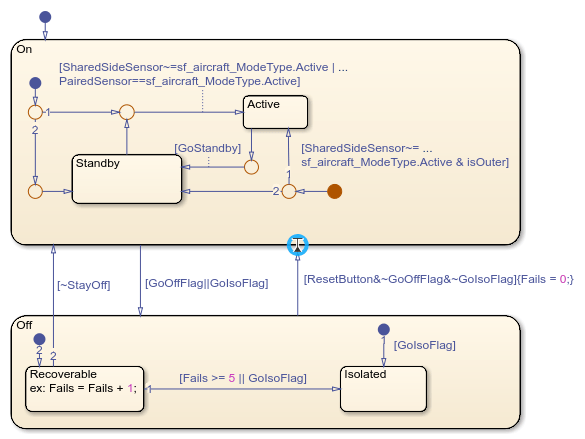
アクチュエータ チャートには、ステート On および Off のサブステートとして表現される 4 つの可能な動作モードがあります。
Standby— アクチュエータは動作可能ですが、アクティブではありません。Active— アクチュエータは動作可能かつアクティブです。Recoverable— アクチュエータは一時的に動作不可です。故障が解決すると、アクチュエータはStandbyに戻ります。Isolated— アクチュエータは、残りのシミュレーションにおいて動作不可です。
各チャートで、次の入力によってステート アクティビティが決まります。
GoOffFlagは、Offステートに遷移するようアクチュエータに指示します。StayOffは、接続された油圧回路の圧力が安定して範囲内に収まるまでOffステートに留まるようアクチュエータに指示します。GoIsoFlagは、Isolatedステートに遷移するようアクチュエータに指示します。
各チャートは、接続された油圧回路の圧力ステータスを反映した追加の入力 StayOff を受け取ります。
既定では、故障検出装置がアクチュエータをオフにすると、アクチュエータは Recoverable ステートに遷移し、ローカル データ オブジェクト Fails が 1 ずつインクリメントします。Fails が 5 になると、アクチュエータは代わりに Isolated に遷移します。
Isolated には exit 遷移がないため、故障システムをリセットしない限り、Isolated ステートのアクチュエータの動作モードは変わりません。一方、StayOff で油圧回路の故障が解決したことが示されると、StayOff ステートのアクチュエータは On ステートに遷移します。
故障からの回復
アクチュエータが動作不可になると、故障検出装置はアクティブな PFCU を変更して故障からの回復を試みます。たとえば、シミュレーションを実行すると、外側のアクチュエータは Active モードで開始され、内側のアクチュエータは Standby モードで開始されます。左外側のアクチュエータで油圧故障が発生した場合、それに応じてその他のアクチュエータが調整されます。
左外側のアクチュエータはオフになります。
左内側のアクチュエータはアクティブになります。
右内側のアクチュエータはアクティブになります。
右外側のアクチュエータは待機状態に移行します。
アクチュエータ チャートは、次の 2 つの入力を使用して Standby と Active 間の遷移を評価します。
SharedSideSensorは、同じ昇降舵にあるもう一方のアクチュエータの動作モードを表します。PairedSensorは、反対の昇降舵にある一致するアクチュエータの動作モードを表します。
故障の投入とリセットによる障害管理の確認
シミュレーション中に故障を投入またはリセットすることで障害管理システムの動作を確認できます。
故障の投入
シミュレーション中にアクチュエータと油圧回路の故障を投入するには、モデルの最上位レベルのスライダーを使用します。位置センサーの故障を投入すると、モデルでは指定されたアクチュエータの位置が急速に変化します。油圧の故障を投入すると、モデルでは指定された油圧回路の圧力が急速に低下します。

たとえば、油圧回路 1 に故障を投入するには、次を行います。
モデルの最上位レベルに戻ります。
[Inject Hydraulic Pressure Failures] ボックスの [H1] を右にスライドします。
モデルは次のように故障に対応します。
Signal Conditioning and Failuresサブシステムが故障を検出し、sf_aircraft_controllerモデル参照に警告を通知します。このモデル参照で、
Mode Logicサブシステムが左外側のアクチュエータにオフにするよう指示します。内側のアクチュエータがアクティブになります。
右外側のアクチュエータは待機状態に移行します。
故障のリセット
油圧回路 1 をオンラインに戻すには、[H1] を左にスライドします。モデルは次のように故障を取り除きます。
左外側のアクチュエータが待機状態に移行します。
内側のアクチュエータはアクティブなまま維持されます。
内側のアクチュエータが故障した場合、モデルは外側のアクチュエータを再度アクティブにできます。
モデルをデフォルト ステートにリセットし、Isolated ステートをオーバーライドするには、[Reset] ボタンをクリックします。
参考文献
Pieter J. Mosterman and Jason Ghidella, "Model Reuse for the Training of Fault Scenarios in Aerospace," in Proceedings of the AIAA® Modeling and Simulation Technologies Conference, CD-ROM, paper 2004-4931, August 16 - 19, 2004, Rhode Island Convention Center, Providence, RI.
Jason R. Ghidella and Pieter J. Mosterman, "Applying Model-Based Design to a Fault Detection, Isolation, and Recovery System," in Military Embedded Systems, Summer, 2006.