Motor & Drive (System Level)
閉ループ トルク制御を使用した汎用モーターおよびドライブ

ライブラリ:
Simscape /
Electrical /
Electromechanical /
System-Level Modeling
説明
Motor & Drive (System Level) ブロックは、閉ループ トルク制御を使用した汎用モーターおよびドライブまたはサーボモーターをモデル化します。このブロックを使用し、牽引システムと作動システムで、システム レベルで幅広いモーター タイプをモデル化します。モデル化できるモーターには、次のようなブラシレス モーターがあります。
永久磁石同期モーター (PMSM):
埋込永久磁石同期モーター (IPM) または埋込永久磁石同期モーター (IPMSM)
表面永久磁石同期モーター (SPM) または表面永久磁石同期モーター (SPMSM)
ブラシレス直流 (BLDC) モーター
軸方向磁束牽引モーター
このブロックを使用して、閉ループ トルク制御を備えたブラシ モーターをモデル化することもできます。
システム レベルでの高速シミュレーションを可能にするために、このブロックではモーター、駆動エレクトロニクス、および制御を抽象化します。
このブロックでは、トルクと速度の包絡線で定義された範囲のトルクと速度のみが許可されます。既定のブロック構成では、ブロック ダイアログ ボックスで速度のデータ点と対応する最大トルク値のセットとしてこのデータを指定します。次の図は、デカルト象限の定義を示しています。
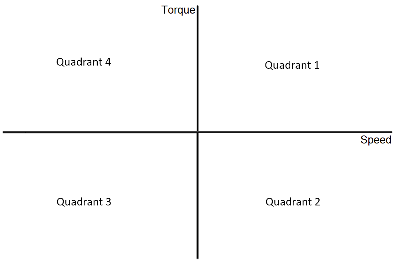
この表は、各象限の速度と電磁トルクの動作領域と値を示しています。
| 象限 | 説明 | 速度 | 電磁トルク | 動作モード |
|---|---|---|---|---|
| 1 | 正転領域 | 正 | 正 | モーター モード |
| 2 | 順方向発電領域 | 正 | 負 | 発電モード |
| 3 | 反転領域 | 負 | 負 | モーター モード |
| 4 | 逆方向発電領域 | 負 | 正 | 発電モード |
この表では、以下のようになります。
モーター モードでは、電力を機械動力に変換します。
発電モードでは、機械動力を電力に変換します。
正の回転速度は、端子 C と R の距離が時間の経過とともに増加することを意味します。
負の回転速度は、端子 C と R の距離が時間の経過とともに減少することを意味します。
正のトルクは、トルクが回転速度の増加に寄与していることを意味します。このブロックは、機械端子 C から R に作用する正のトルクを生成します。
負のトルクは、回転速度の減少に寄与します。回転速度が既に負の場合、負のトルクは負の方向に加速します。
正のトルク領域 (第 1 象限と第 4 象限) のトルクと速度の包絡線のみを指定します。モーターが逆方向で動作している場合 (第 2 象限と第 3 象限で表現されます)、モーターのトルクと速度の包絡線は同じプロファイルになります。正の速度に対してのみ包絡線を指定した場合は、第 4 象限のトルク包絡線はブロックによって第 1 象限の鏡像として定義されます。次の図は、トルク制御のモーターおよびドライブの標準的なトルクと速度の包絡線を示しています。

表形式のトルクと速度のデータを指定する代わりに、最大トルクおよび最大出力を指定できます。この図は、結果として得られたトルクと速度の包絡線のプロファイルを第 1 象限に示したものです。この同じプロファイルによって残りの 3 つの動作象限が制約されます。

Visualize Four-Quadrant Operation of Electric Drive Systemの例は、4 つのすべての象限で動作する Motor & Drive (System Level) ブロックのトルクと速度の軌跡を可視化するのに役立ちます。
メモ
Simscape™ Electrical™ には、同じタイプのモーターまたはアクチュエータをモデル化できる複数のブロックが含まれています。回答が必要なエンジニアリング設計の質問に対して十分なモデル化の詳細を備えたブロックを選択してください。ただし、モデルの忠実度が高いほどシミュレーションが遅くなり、パラメーター化がより複雑になるため、必要以上の詳細なモデル化をもつブロックを使用しないでください。
Motor & Drive (System Level) ブロックのようなブロックは、エネルギー バランシングやその他の抽象化手法を使用します。これらのモデルの忠実度は低レベルです。このブロックは、電気自動車のドライブ サイクルを解析する場合など、長いシミュレーション時間が必要な場合に使用します。適切な忠実度でモーターをモデル化するための適切なブロックの選択の詳細については、モーターまたはアクチュエータをモデル化するためのブロック選択を参照してください。
断続的な過トルクの動作
モーターを短期間過トルク状態にするには、[断続的な過トルクを許可] パラメーターを [はい] に設定します。この場合は、[連続動作時の最大トルクの包絡線] パラメーターと [断続動作時の最大トルクの包絡線] パラメーターの両方に値を指定する必要があります。内部的に、トルク要求履歴に基づいて、適用するトルク包絡線がブロックによって決定されます。[回復時間] パラメーターに指定した値より長い間、トルク要求が連続動作トルク包絡線を下回っている場合、モーター ドライブを過トルク状態にすることができます。[過トルクの時間制限] パラメーターに指定した値より長い間、過トルクが適用されると、過トルクは無効になります。
過トルクについて、よりアプリケーション固有の管理を行うには、Motor & Drive ブロックで過トルクを無効にし、Motor & Drive ブロックのトルク要求とトルク指令入力端子 Tr の間に Simulink® でトルク制限を外部的に実装します。
電気損失のモデル化
このブロックでは、電気損失の簡略化した定義と表形式の定義の両方が使用可能です。既定の簡略化した動作では、次の 4 つの項の合計として損失をモデル化します。
DC 電源とモーター ドライブ間の直列抵抗。
トルクと速度に依存しない固定損失 P0。これを使用してコンバーターの固定損失を考慮します。
トルク依存の電気損失 kτ2。ここで、τ はトルク、k は定数です。これは、銅巻線の抵抗による損失を表します。
速度依存の電気損失 kwω2。ここで、ω は速度、kw は定数です。これは、渦電流に起因する鉄損を表します。
トルクおよび速度に対する損失の依存のこの簡略化は、基となるモーター タイプおよびドライブ トポロジに関係なく、初期段階の設計作業では十分な場合があります。
精度を上げる必要がある場合や設計プロセスの後半では、モーター速度と負荷トルクの関数として表形式の損失値を指定できます。このオプションを使用する場合は、シミュレーションを実行するすべての動作象限のデータを指定します。部分的なデータ (たとえば、第 1 象限のモーターの正転領域のみのデータ) を指定した場合、残りの象限では同じパターンの損失が繰り返されるものとみなされます。これは通常、モーターの反転領域では適切ですが、制動/生成の象限では近似になることがあります。このブロックは、テーブルの範囲を超過している速度およびトルクの大きさの損失値の外挿を実行しません。
最後に、単一の効率測定や表形式の損失データの代わりに、表形式の効率データを使用して電気損失を指定できます。このオプションを使用する場合は、シミュレーションを実行するすべての動作象限のデータも指定します。部分的なデータ (たとえば、第 1 象限のモーターの正転領域のみのデータ) を指定した場合、残りの象限では同じパターンの損失が繰り返されるものとみなされます。
ベスト プラクティスとしては、表形式の効率データではなく、速度とトルクの関数として表形式の損失データを指定します。理由は次のとおりです。
速度ゼロまたはトルク ゼロで効率が正しく定義されない。
損失を使用すれば、速度ゼロまたはトルク ゼロでも存在している固定損失も考慮できる。
表形式の効率のオプションを使用する場合は、次のとおりです。
指定した効率値がブロックによって損失に変換され、表形式の損失がシミュレーションで使用されます。
速度ゼロまたはトルク ゼロに対して指定した効率値は無視され、トルクまたは速度がゼロのときは損失がゼロであると想定されます。
このブロックでは線形内挿を使用して損失を判別します。低出力条件で必要なレベルの精度を実現するには、必要に応じて、低い速度および低いトルクに対して表形式のデータを指定します。
このブロックは、テーブルの範囲を超過している速度およびトルクの大きさの損失値の外挿を実行しません。
表形式の損失データまたは効率データを指定する場合は、速度、負荷トルク、および DC 電源電圧の関数としてそのデータを指定することもできます。このオプションは、電源電圧が制御されておらず、シミュレーション中に変化する可能性がある場合に役立ちます。一例として、モーター ドライブの上流に DC-DC レギュレーターがない電気自動車のドライブトレインが挙げられます。Motor & Drive (System Level) ブロックを使用して、モーター ドライブをモデル化し、モーター速度、負荷トルク、および DC 電源電圧の関数として表形式の損失値または効率値を指定します。
効率マップのプロット
このブロックでは、トルクと速度の包絡線と、モーターおよびドライブの定常状態の電気効率のマップを可視化できます。効率マップをプロットするには、次のいずれかを行います。
ブロック線図内のブロックをダブルクリックし、[説明] タブで
[効率マップのプロット]をクリックします。ブロック線図内のブロックをダブルクリックし、[ユーティリティ] セクションで [効率マップ] パラメーターの横にある [プロット] ボタンをクリックします。 (R2026a 以降)
この効率マップには、[外部電源の直列抵抗] パラメーターおよび [回転子の減衰] パラメーターによって生成された損失は含まれません。

熱効果のモデル化
熱端子を表示して、電力を熱に変換する損失の影響をモデル化できます。熱端子を表示するには、[モデリング オプション] パラメーターを次のどちらかに設定します。
熱端子なし— ブロックに熱端子は含まれません。熱端子を表示— ブロックに 1 つの熱保存端子が含まれます。
アクチュエータ ブロックにおける熱端子の使い方の詳細については、回転アクチュエータおよび並進アクチュエータでの熱効果のシミュレーションを参照してください。
故障のモデル化
Motor & Drive (System Level) ブロックの故障をモデル化するには、[故障] セクションで、モデル化する故障の横にある [故障の追加] をクリックします。故障のモデル化の詳細については、故障動作のモデル化と故障トリガーを参照してください。
Motor & Drive (System Level)ブロックにより、開放故障をモデル化できます。この故障がトリガーされると、サーボモーターは動作を停止し、ゼロ電流を電源側から受け取り、ゼロ電流を負荷側に供給します。
[トリガー タイプ] パラメーターを使用して、故障がいつどのように発生するかを指定します。
[トリガー タイプ] を [時間指定] に設定した場合、シミュレーション時間が [次の時間で故障をトリガー] パラメーターに指定した値に達したときに Motor & Drive (System Level) ブロックで故障がトリガーされます。
[トリガー タイプ] を [条件付き] に設定した場合は、Motor & Drive (System Level) ブロックの故障が可逆的であるかどうかを選択できます (R2025a 以降)。不可逆的な故障をモデル化するには、[故障のプロパティを開く] をクリックしてプロパティ インスペクターを開き、[トリガーをアクティブにしたらその状態を維持] パラメーターを選択します。トリガー条件が最初に真になったときにブロックが故障状態に入り、残りのシミュレーションにおいて故障状態のままになります。可逆的な故障をモデル化するには、[トリガーをアクティブにしたらその状態を維持] パラメーターをクリアします。ブロックはトリガー条件が真になると故障状態に入り、トリガー条件が偽になると無故障状態に入ります。
ブロックへの故障の追加と故障トリガーの指定の詳細については、Introduction to Simscape Faultsを参照してください。
変数
シミュレーションの前にブロック変数の優先順位と初期ターゲット値を設定するには、ブロックのダイアログ ボックスまたはプロパティ インスペクターの [初期ターゲット] セクションを使用します。詳細については、ブロック変数の優先順位と初期ターゲットの設定を参照してください。
ノミナル値は、モデル内で予想される変数の大きさを指定する方法を提供します。ノミナル値に基づくシステムのスケーリングを使用すると、シミュレーションのロバスト性が向上します。ノミナル値は、ブロックのダイアログ ボックスまたはプロパティ インスペクターの [ノミナル値] セクションなど、さまざまなソースを使用して指定できます。詳細については、ノミナル値によるシステムのスケーリングを参照してください。
例

Visualize Four-Quadrant Operation of Electric Drive System
Helps you visualize the torque-speed trajectory of a Motor & Drive (System Level) block operated in all four quadrants.

ブラシレス DC モーター
この例では、ブラシレス DC モーター (サーボモーター) のシステムレベル モデルをデータシート情報に基づいて作成し、パラメーター化する方法を説明します。モーターとドライバーは、単一のマスク サブシステムとしてモデル化されています。Simulink® でモデルを表示する場合、Motor and driver ブロックを選択して Ctrl + U と入力すると、マスクの下を見てモデルの構造を確認できます。

モーターのトルク-速度曲線
この例では、5 つの異なるモーター タイプのトルク-速度特性の比較を示します。モーター タイプを選択するには、Electric Motor ブロックを右クリックし、コンテキスト メニューから [ブロック パラメーター (Subsystem)] を選択します。新しいウィンドウで、[ラベル モードのアクティブな選択肢] パラメーターを使用して目的のモーターを指定します。すべてのモーターは、ほぼ同じ定格機械動力に調整されています。

Motor-CAD からの効率マップ データのインポート
この例では、Motor-CAD から効率マップ データをインポートして、Simscape™ Electrical™ の Motor & Drive (System Level) ブロックをパラメーター化する方法を説明します。これにより、損失に関する正確な予測を行いながら、モーター ドライブのシステムレベル シミュレーションを高速で行うことができます。

火星のヘリコプターのシステムレベル設計
この例では、Simscape™ Electrical™ を使用して、火星での飛行に適した同軸回転子をもつヘリコプターをモデル化する方法を説明します。このヘリコプターは NASA が開発したロボット ヘリコプター Ingenuity をヒントにしています。これは、別の惑星での最初の動力飛行を実現しました。

システムレベルの AC ドライブ
この例では、AC-DC Converter (Three-Phase) ブロックおよび Motor & Drive (System Level) ブロックを使用して、電気機械のシステムレベルの AC ドライブをモデル化する方法を説明します。AC-DC コンバーターは、一定の DC リンク電圧を提供する送電系統側コンバーターを表します。Motor & Drive ブロックは、DC-AC コンバーターを備えた汎用 AC 電気機械として動作します。このモデル化アプローチにより、パワー コンバーターのスイッチング イベントのない高速なシステムレベルのシミュレーションができます。

Model a Motor Drive with Multiple Intermittent Torque Limits
Model a motor drive with multiple intermittent over-torque limits by using Simscape™ Electrical™.
仮定と制限
モーター ドライバーは、時定数 Tc を使用してトルク要求を追跡します。
機械的負荷に起因するモーター速度の変動は、モーター トルクの追跡に影響しません。
電気的接続は、正の電圧を提供し、必要な電力を供給または吸収できる電源 (DC 電圧源やバッテリーなど) に常に接続される必要があります。電源のオンおよびオフのシミュレーションを行うには、故障のモデル化を参照してください。