Wheel and Axle
機械システムの車輪と車軸の機構

ライブラリ:
Simscape /
Foundation Library /
Mechanical /
Mechanisms
説明
Wheel and Axle ブロックは、次の構成図に示されている車輪および車軸を表します。
車輪と車軸には同じ軸があり、軸は座標系に剛結合されるものと想定されています。そのため、この機構は、機械回転運動を機械並進運動に変換する理想的なコンバーターになります。この機構には 2 つの接続、すなわち機械回転端子 A と機械並進端子 P があります。端子 A は車軸に対応しており、端子 P は車輪外周に対応しています。この機構は次の方程式で記述されます。
ここで、
T は車軸にかかるトルクです。
F は車輪外周にかかる力です。
ω は角速度です。
v は車輪外周の線形速度です。
r は車輪半径です。
or は機構の向きを示すインジケーターです。グローバルに割り当てられた正方向の車軸回転が正方向の並進運動に変換される場合、値は +1 です。正の回転の結果として負方向の並進運動が生じる場合は、値は -1 です。
このブロックは、ラックピニオン、ステアリング ホイール、巻上装置、ウィンドラスなどのシミュレーションで使用します。
このブロックの正方向は、A から基準点に向かう方向と、基準点から P に向かう方向です。
変数
シミュレーションの前にブロック変数の優先順位と初期ターゲット値を設定するには、ブロックのダイアログ ボックスまたはプロパティ インスペクターの [初期ターゲット] セクションを使用します。詳細については、ブロック変数の優先順位と初期ターゲットの設定を参照してください。
ノミナル値は、モデル内で予想される変数の大きさを指定する方法を提供します。ノミナル値に基づくシステムのスケーリングを使用すると、シミュレーションのロバスト性が向上します。ノミナル値はさまざまなソースから得られます。その 1 つがブロックのダイアログ ボックスまたはプロパティ インスペクターの [ノミナル値] セクションです。詳細については、ブロック変数のノミナル値の変更を参照してください。
例
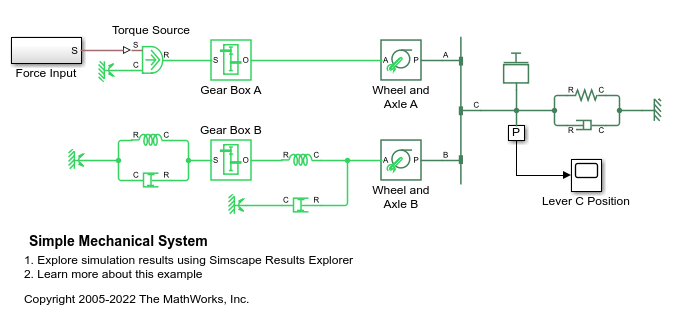
単純な機械システム
この例では、回転運動と並進運動を接続するシステムのモデルを説明します。加算てこが駆動する負荷は、質量、粘性摩擦、およびジョイント C に接続するバネで構成されています。ジョイント B は、ホイールおよび軸とギア ボックスを経由する基準点に接続する 2 つの回転バネに吊り下げられています。ジョイント A は、ギア ボックスとホイールおよび軸機構を経由してトルク源に接続されています。
端子
保存
パラメーター
拡張機能
バージョン履歴
R2007a で導入