単純な機械システム
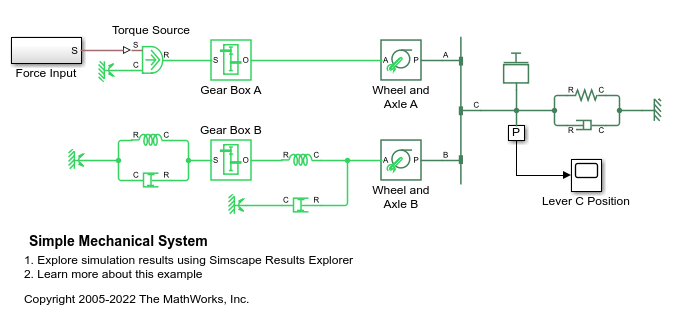
この例では、回転運動と並進運動を接続するシステムのモデルを説明します。加算てこが駆動する負荷は、質量、粘性摩擦、およびジョイント C に接続するバネで構成されています。ジョイント B は、ホイールおよび軸とギア ボックスを経由する基準点に接続する 2 つの回転バネに吊り下げられています。ジョイント A は、ギア ボックスとホイールおよび軸機構を経由してトルク源に接続されています。
モデル
Scope からのシミュレーション結果

この例では、回転運動と並進運動を接続するシステムのモデルを説明します。加算てこが駆動する負荷は、質量、粘性摩擦、およびジョイント C に接続するバネで構成されています。ジョイント B は、ホイールおよび軸とギア ボックスを経由する基準点に接続する 2 つの回転バネに吊り下げられています。ジョイント A は、ギア ボックスとホイールおよび軸機構を経由してトルク源に接続されています。