メカニズム
Simscape™ Multibody™ には、リンクやプーリなどのさまざまなメカニズムをモデル化、設計、解析するためのツールが用意されています。
注目の例

エレベーター
この例では、エレベーター システムを Simscape™ Multibody™ でモデル化します。このシステムは、エレベーターの動きとドアの機構を制御するベルト-ケーブル プーリ回路で構成されています。ケーブルは、ベルト-ケーブルの端とエレベーターの間に高剛性のバネを使用することにより、伸張性をもつように近似されます。モーター プーリは、階数の入力から計算される、必要なエレベーター運動学に基づいて作動します。エレベーターに人が乗り降りする効果は、General Variable Mass ブロックを使用してモデル化されます。

屋外遊園地の回転式乗り物
この例では、屋外遊園地の回転式乗り物を示します。ホイールに適用されたトルクによって乗り物が回転し、油圧アクチュエータによって、アームを持ち上げるための力が与えられます。乗りかごはホイールの半径とほぼ正接の関係にある軸の周りを自由に回転できます。ホイールが垂直近くまで来ると、乗りかごにかかる遠心加速度 (ホイールの回転によって発生) により、乗りかごが必ず垂直に近い位置に近づきます。したがって、乗客は回転の一番上で「逆さ」に近い状態になります。
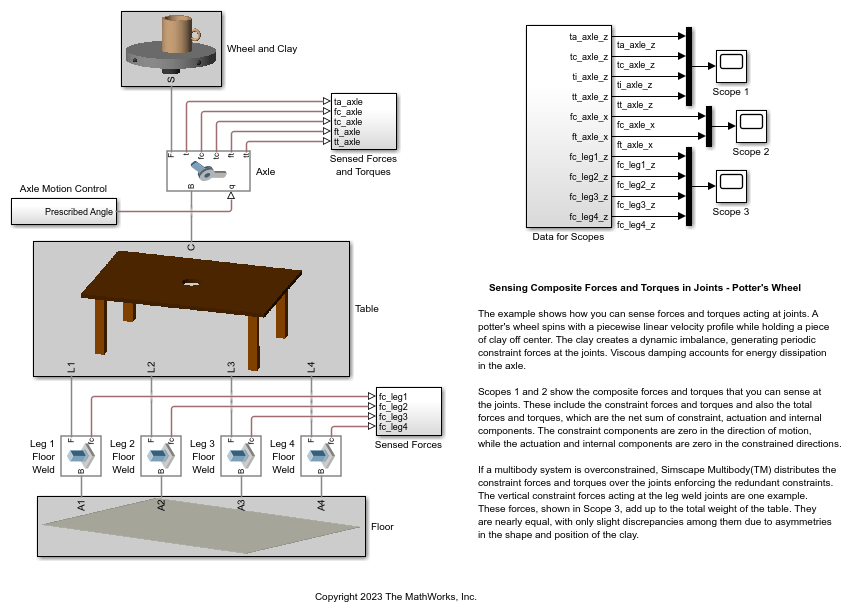
ジョイントでの合成力と合成トルクの検出 - ろくろ
この例では、ジョイントに働く力とトルクを検出する方法を示します。ろくろは、中央からずれた位置で粘土を支えながら、区分線形速度プロファイルで回転します。粘土は動的な不均衡をもたらすため、ジョイントにかかる周期的な拘束力が生じます。粘性減衰は、軸におけるエネルギー散逸を考慮します。
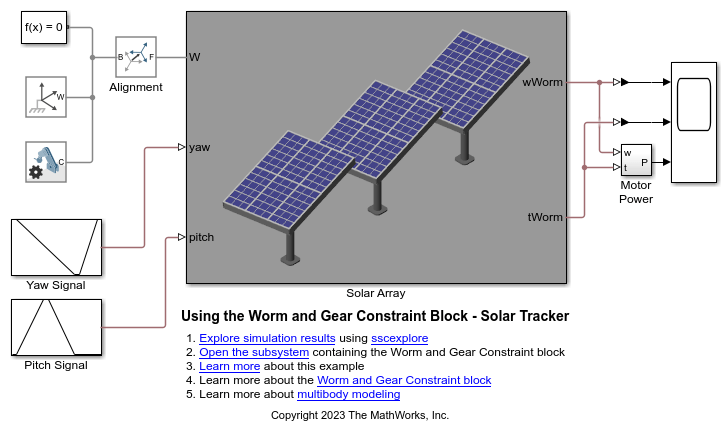
Worm and Gear Constraint ブロックの使用 - 太陽光追尾装置
この例では、Worm and Gear Constraint ブロックを使用して太陽光追尾装置をモデル化する方法を説明します。ウォーム ギア拘束を含む旋回ドライブは、太陽光追尾装置のヨー回転に動力を供給します。ウォーム ギアのジオメトリは、単段のギア装置で大きな減速を与え、高精度のトラッキングと高トルク出力を提供します。ギアの回転ジョイントに運動入力としてヨー回転が指定され、必要なアクチュエータ トルクがウォームの回転ジョイントで自動的に計算されます。