水タンク水位の受動制御
この例では、"制御システム調整器" アプリを使用して、Simulink® でモデル化された非線形プラントのコントローラーを設計する方法を説明します。次のタスクが実行できます。
補償器の調整用のモデルとアプリの設定
受動性ベースの設計を使用した 1 次補償器の調整
閉ループの非線形応答のシミュレーション
制御システムの Simulink モデル
cst_watertank_comp_design model モデルでは、水タンクの水位を制御するフィードバック ループをモデル化しています。Controller ブロックには、調整する 1 次補償器が含まれます。
mdl = 'cst_watertank_comp_design';
open_system(mdl)
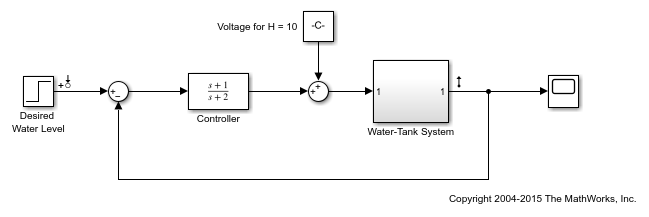
Water Tank サブシステムは、水タンクのダイナミクスをモデル化します。水が上部からタンクに流れ込む速度は、ポンプに印加された電圧 (V) に比例します。水がタンク ベースの開口部を通り抜けるレートは、タンク内の水の高さ (H) の平方根に比例します。水流レートに平方根があるため、このプラントは非線形になります。
水流の非線形モデルは、次のようになります。


ここで、
 はタンクの水の高さ
はタンクの水の高さ はポンプに印加された電圧
はポンプに印加された電圧 はタンクの断面積
はタンクの断面積 および
および  はタンク内への流量とタンク外への流量に関連した定数
はタンク内への流量とタンク外への流量に関連した定数
このシステムは、以下により、ストレージ関数  では受動的です。
では受動的です。

受動性ベースの制御
受動性定理により、2 つの厳密に受動的なシステム  および
および  の負のフィードバック相互接続は常に安定します。
の負のフィードバック相互接続は常に安定します。
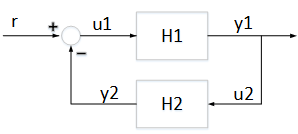
水タンク システムは受動的であるため、プラント モデルが不正確であっても閉ループの安定性が保証されるようコントローラーを厳格に受動的にすることを求めるのは理に適っています。
制御システム調整器を使用した補償器の調整
制御システム調整器アプリを使用して Controller ブロックを調整できます。
手順 1: 制御システム調整器アプリを開きます。Simulink モデル ウィンドウの [アプリ] タブの [アプリ] ギャラリーで [制御システム調整器] をクリックします。
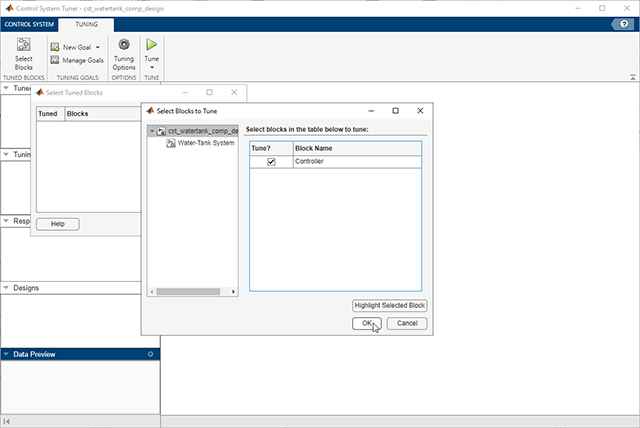
手順 2: [調整] タブの [ブロックの選択] ボタンから調整されたブロック セレクターを起動します。
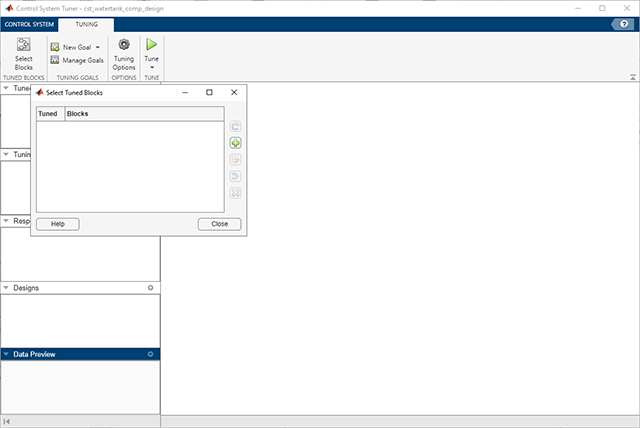
手順 3: Controller ブロックを選択し、[OK] をクリックします。このブロックは [調整ブロック] リストに表示されます。
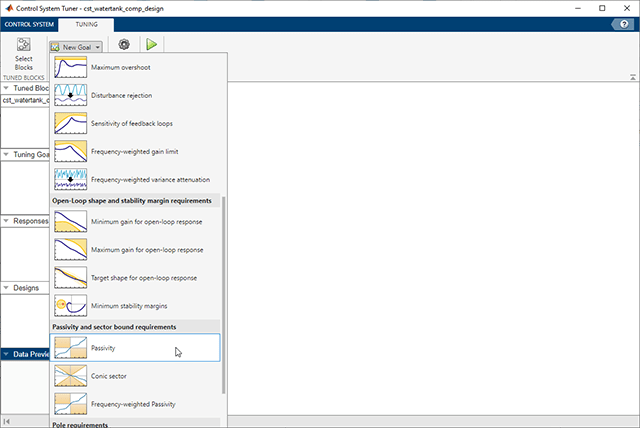
手順 4: 調整目標を指定します。次の 2 つの主要な目標があります。
水位のステップ変化を追従する
コントローラーを受動にする
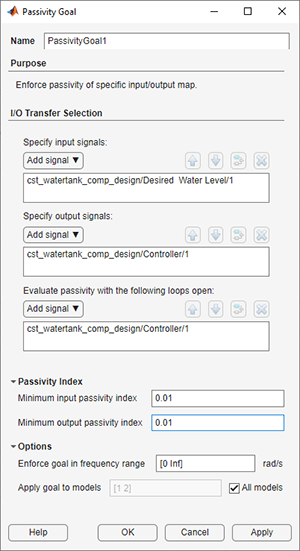
[新規目標] ドロップダウン リストをクリックし、最初に [受動性] 目標を追加します。
Controller ブロックのみに適用するようこの目標を構成します。これは、入力信号を "Desired Water Level"、出力信号を Controller ブロックの出力、ループ開始点を Controller ブロック出力に設定して行います。また、入力と出力の最小受動性インデックスとして 0.01 を指定し、厳格な受動性を適用します。
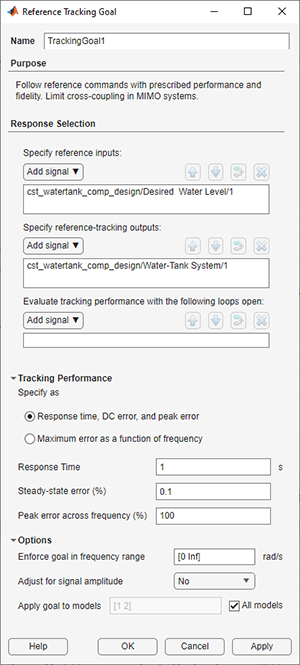
次に、[新規目標] ドロップダウン リストから [設定値追従] 目標を追加します。応答時間を 1 秒としてこの目標を構成します。
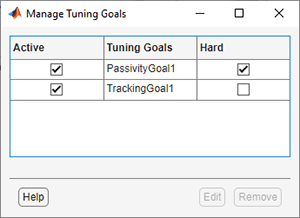
最後に、[調整] タブの [目標の管理] ボタンをクリックして、受動性目標を厳密な調整制約としてマークします。
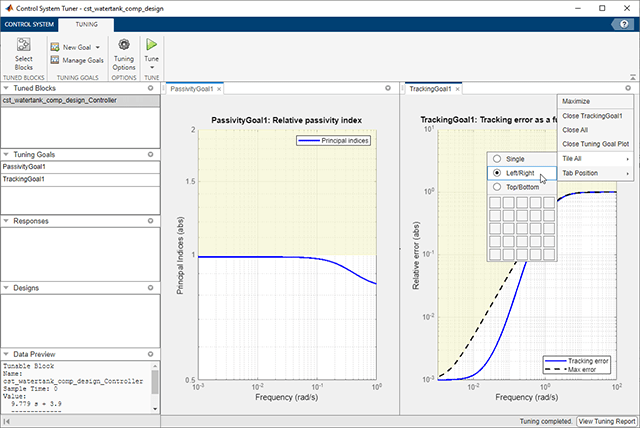
手順 5: Controller ブロックを調整する準備が整いました。[調整] ボタンをクリックします。[ビュー] タブで [左/右] を選択し、調整結果を左右に並べて表示できます。
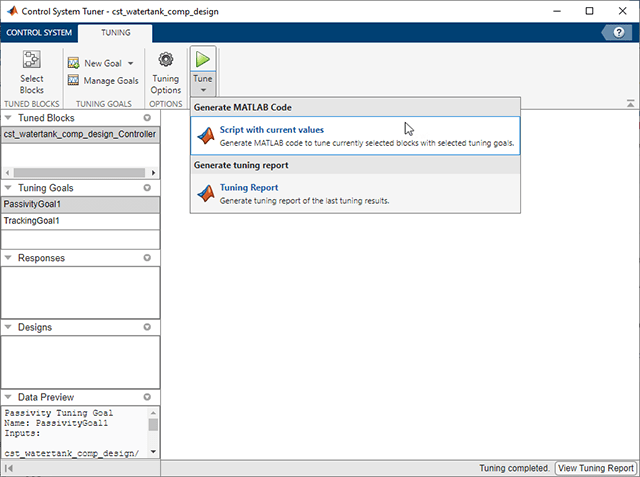
この調整過程を再現する MATLAB® スクリプトを生成して、これらの結果をさらに解析できます。
閉ループのシミュレーション
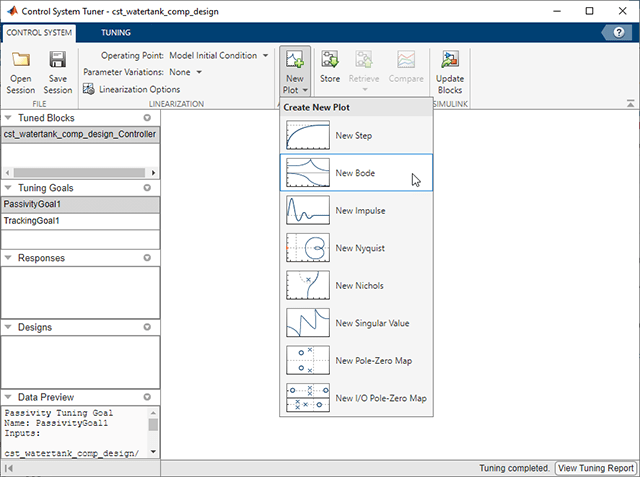
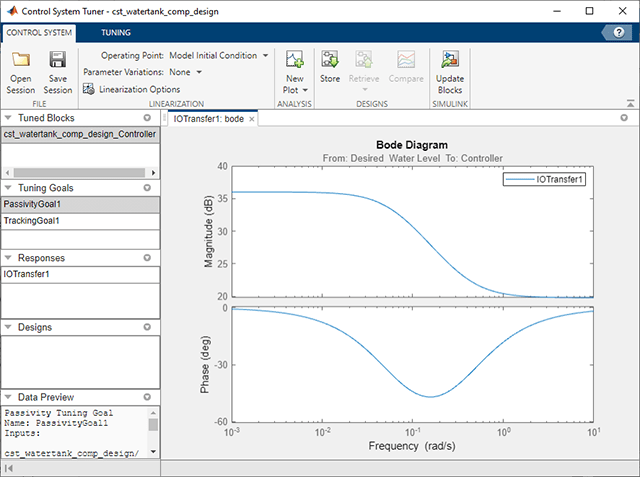
調整後のコントローラーのボード線図を表示できます。[Control System] タブの [新規プロット] ボタンをクリックします。ドロップダウン リストから [新規ボード] を選択します。
コントローラーの応答は次のように指定できます。

[プロット] ボタンをクリックします。ボード線図は、次の図に表示されます。
調整後のコントローラーで閉ループ非線形応答をシミュレートすることもできます。最初に、[Control System] タブで [ブロックの更新] をクリックして Controller ブロックを更新します。

Simulink モデルで、Scope ブロックをダブルクリックして [スコープ] ウィンドウを開き、モデルをシミュレートします。
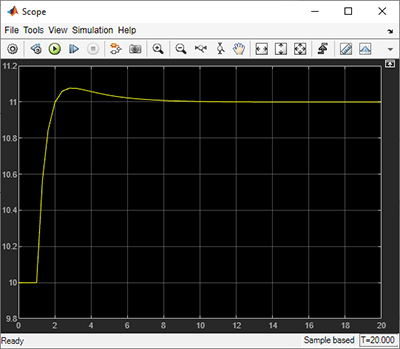
調整後の制御システムの非線形応答が [スコープ] ウィンドウに表示されます。このシミュレーションによって、追従性能が満足なものであることがわかります。