外乱の抑制目標
目的
制御システム調整器を使用しているときに、特定の位置での特定の周波数帯域内の外乱を減衰します。
説明
外乱の抑制目標は、制御システムの指定した位置で加えられた外乱の最小 attenuation を指定します。
この調整目標を使用する場合、指定した位置における外乱の減衰が指定した最小 attenuation 係数を超えるように、システムの調整が試行されます。減衰係数は、外乱に対する開ループの感度と閉ループの感度の比率で、周波数の関数です。
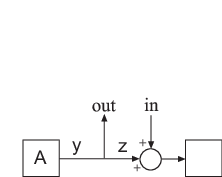
減衰係数の計算方法を次の図に示します。ブロック A の出力である制御システムの位置 y を指定すると仮定します。この場合、in で加えられる信号に対する out での閉ループの感度がソフトウェアによって計算されます。また、位置 z で制御ループが開いた状態での感度も計算されます。
外乱の抑制目標を指定するには、外乱を抑制する位置を 1 つ以上指定します。周波数依存の最小 attenuation 係数を数値 LTI モデルとして指定することもできます。外乱の抑制は、制御帯域幅内でのみ実現できます。ループ ゲインは、減衰する外乱のゲインよりも大きくなければなりません (減衰係数 > 1)。
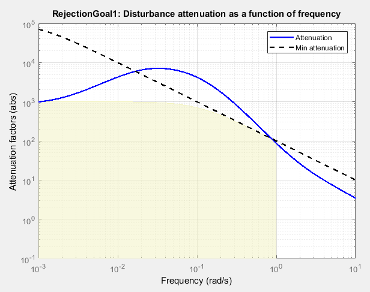
制御システム調整器で調整目標を作成すると、調整目標プロットが作成されます。点線はユーザーが指定するゲイン プロファイルを示します。プロットの影付き領域は、周波数領域内の調整目標が満たされない範囲を表しています。実線はシステムの対応する現在の応答です。
外乱の抑制ではなく、ある位置での外乱への感度を指定する場合は、感度目標を使用できます。
作成
制御システム調整器の [調整] タブで [新規目標] 、 [外乱の抑制] を選択して外乱の抑制目標を作成します。
コマンド ラインにおける同等の操作
コマンド ラインで制御システムを調整する場合、TuningGoal.Rejection を使用して外乱の抑制目標を指定します。
外乱シナリオ
ダイアログ ボックスのこのセクションを使用して、外乱を加える信号の位置を指定します。調整目標を評価するためのループ開始点を指定することもできます。
次の位置の外乱の挿入
外乱の減衰を測定するモデル内の信号の位置を 1 つ以上選択します。SISO 応答を制約するには、単一値の位置を選択します。たとえば、
'y'という名前の位置で外乱を減衰するには、 [信号をリストに追加] をクリックして
[信号をリストに追加] をクリックして 'y'を選択します。MIMO 応答を制約するには、複数の信号またはベクトル値の信号を選択します。次の開ループの外乱の抑制の評価
この調整目標を評価するために、フィードバック ループを開くモデル内の信号の位置を 1 つ以上選択します。調整目標は、特定した位置でフィードバック ループを開くことにより作成される開ループの構成に対して評価されます。たとえば、
'x'という名前の位置が開始点の調整目標を評価するには、 [信号をリストに追加] をクリックして、'x'を選択します。
ヒント
Simulink® モデル内で選択された任意の信号を強調表示するには、![]() をクリックします。入力リストまたは出力リストから信号を削除するには、
をクリックします。入力リストまたは出力リストから信号を削除するには、 をクリックします。複数の信号を選択した場合、
をクリックします。複数の信号を選択した場合、 および
および  を使用してそれらの信号を並べ替えることができます。調整目標のために信号の位置を指定する方法の詳細については、対話型調整の目標の指定を参照してください。
を使用してそれらの信号を並べ替えることができます。調整目標のために信号の位置を指定する方法の詳細については、対話型調整の目標の指定を参照してください。
抑制パフォーマンス
外乱の最小の減衰を周波数の関数として指定します。
振幅が目標の減衰プロファイルを表す SISO 数値 LTI モデルを周波数の関数として入力します。たとえば、滑らかな伝達関数 (tf、zpk または ss モデル) を指定できます。または、frd モデルを使用して区分的な最小の外乱の抑制をスケッチできます。これを行う場合、ソフトウェアは目的の最小の外乱の抑制を近似する滑らかな伝達関数にプロファイルを自動的にマッピングします。たとえば、減衰係数を 1 rad/s 未満では 100 (40 dB) に指定し、そこから徐々に減少して 10 rad/s を過ぎると 1 (0 dB) になるように指定するには、「frd([100 100 1 1],[0 1 10 100])」と入力します。
離散時間で調整を行う場合、調整に使用するのと同じサンプリング時間をもつ離散時間モデルとして減衰プロファイルを指定できます。減衰プロファイルを連続時間で指定すると、調整ソフトウェアはこれを離散化します。減衰プロファイルを離散時間で指定すると、ナイキスト周波数付近でプロファイルをより詳細に制御できます。
オプション
ダイアログ ボックスのこのセクションを使用して、外乱の抑制目標の追加特性を指定します。
周波数範囲の目標を適用
調整目標の適用を特定の周波数帯域に制限します。周波数帯域をモデルの周波数単位で表した形式
[min,max]の行ベクトルとして指定します。たとえば、1 ~ 100 rad/s のみに適用される調整目標を作成する場合は、[1,100]と入力します。既定では、調整目標は連続時間の場合はすべての周波数、離散時間の場合はナイキスト周波数以下の周波数に適用されます。入力した制限にかかわらず、外乱の抑制目標は制御帯域幅内にのみ適用されます。
クロスチャネル効果のイコライズ
マルチループまたは MIMO 外乱抑制要件の場合、フィードバック チャネルは自動的に再スケーリングされ、開ループ伝達関数の非対角項 (ループ相互作用の項) が均等化されます。このようなスケーリングを無効にし、スケーリングされていない開ループ応答を整形するには、
[オフ]を選択します。目標を適用
たとえば、Simulink モデルを異なる操作点またはブロックパラメーター値で線形化することによって得られるモデルの配列などの複数のモデルを同時に調整している場合、このオプションを使用します。既定では、アクティブな調整目標がすべてのモデルに適用されます。調整要件を配列内の一部のモデルに適用するには、[モデルのみ] を選択します。次に目標を適用するモデルの配列インデックスを入力します。たとえば、モデル配列の中の 2 番目、3 番目、4 番目のモデルに調整目標を適用する必要があると仮定します。要件の適用を制限するには、[モデルのみ] テキスト ボックスに
2:4と入力します。複数モデルの調整の詳細については、Robust Tuning Approaches (Robust Control Toolbox)を参照してください。
アルゴリズム
調整目標の評価
制御システムを調整するときに、各調整目標は正規化されたスカラー値 f(x) に変換されます。ここで x は、制御システムの自由 (調整可能な) パラメーターのベクトルです。その後、ソフトウェアはパラメーター値を調整して f(x) を最小化するか、調整目標が厳密な制約値の場合、f(x) が 1 より小さくなるようにします。
[外乱の抑制目標] の場合、f(x) は次のようになります。
またはその離散時間の等価物です。ここで、S(jω,x) は外乱の位置で測定された閉ループ感度関数です。Ω は、要件が適用される周波数範囲で [周波数範囲の目標を適用] フィールドで指定されます。WS は、指定する減衰プロファイルから導出された周波数重み付け関数です。WS および指定されたプロファイルのゲインは、–20 dB から 60 dB の範囲のゲイン値に対してほぼ一致します。数値的な理由から、指定されたゲイン プロファイルの傾きがこの範囲の外で変化する場合を除き、重み付け関数はこの範囲の外では平坦になります。この調整は、"正則化" と呼ばれます。WS の極は s = 0 または s = Inf の近くで調整の数値的条件が劣化する可能性があるため、周波数が極度に低い、あるいは極度に高いダイナミクスでループ整形を指定することは推奨されません。正則化とその効果の詳細については、調整目標の可視化を参照してください。
暗黙的な制約
この調整目標は、指定された位置で測定され、指定されたループ開始点でループが開いた状態で評価される、閉ループ感度関数に暗黙的な安定性の制約を課します。この暗黙的な制約に影響を受けるダイナミクスは、この調整目標の "安定ダイナミクス" です。[最小 decay 率] と [最大固有振動数] の調整オプションは、これらの暗黙的に制約されるダイナミクスの下限と上限を制御します。最適化が既定の制限を満たしていない場合、または既定の制限が他の要件と競合している場合、[調整] タブで [調整オプション] を使用して既定の設定を変更します。