Overcome Performance Challenges in PID Control Systems
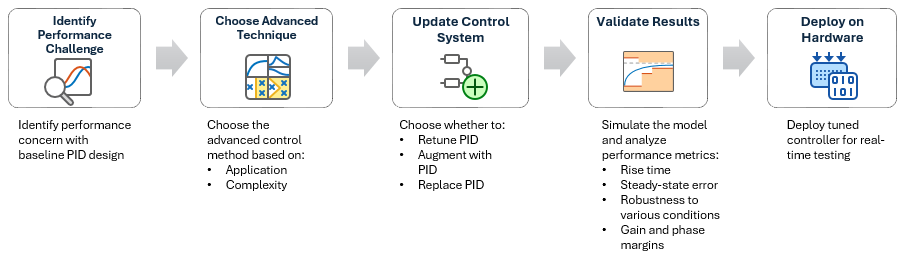
Sometimes with a baseline PID design, you may face performance issues based on several concerns. To address such issues, you can use advanced control techniques from Simulink® Control Design™ software to augment your baseline PID control system.
Performance Challenges Overview
Real-world systems often present complexities such as nonlinear dynamics, external disturbances, operational constraints, and time delays that significantly degrade the performance of baseline PID controllers. These issues arise because traditional PID assumes linearity and fixed operating conditions, which rarely hold in real-word systems. This table summarizes common performance challenges, their underlying causes, and links to solutions that you can use to enhance robustness, stability, and adaptability in demanding environments.
| Performance Concern | Primary Cause | Solution |
|---|---|---|
| Nonlinearities, complex dynamics, and uncertainties — Plants with fast-changing dynamics, wide operating range, or complex dynamics that are difficult to model. | PID controllers assume a linear relationship between input and output. In nonlinear systems or inaccurate models, this assumption can lead to suboptimal performance or instability | Improve PID Design in Presence of Nonlinearities and Uncertainties |
| External disturbance — Large measured or unmeasured disturbances occurring at plant input, output, and/or states. | PID controllers might struggle to compensate large disturbance and provide desired transient behavior, such as keeping overshoot within certain limits. There is also a trade-off between tracking performance and disturbance rejection performance. | Improve PID Design in Presence of Unmeasured Disturbance |
| Constraints — Plants have constraints | PID controllers do not handle constraints explicitly, especially with states such as safety sets and input-output characteristics such as passivity | Improve PID Design to Handle Plant Constraints |
Advanced Techniques Overview
To overcome these challenges, Simulink Control Design offers advanced techniques such as disturbance compensation, adaptive control, constraint enforcement, and data-driven autotuning. These methods extend PID capabilities by improving robustness to uncertainty, handling constraints, and optimizing performance in dynamic environments.
Disturbance Compensation
| Method | How it Works | Advantages | Risks | When to Use | Typical Applications |
|---|---|---|---|---|---|
| Disturbance Compensation | Observer-based estimates of disturbance and subtracts them from control input. | Simple concept, improves tracking | Requires accurate disturbance model estimation, may amplify noise with high observer bandwidth | When model uncertainty is high and real-time disturbance rejection is critical. | Motion control, robotics, electromechanical drives. |
| Active Disturbance Rejection Control | Estimates and cancels total disturbances (internal uncertainty + external disturbance) using an Extended State Observer (ESO). | Robust to model uncertainty, minimal plant modeling needed, adaptive to disturbances. | Need to tune ESO gains, observer noise sensitivity, stability analysis less standard. | When model uncertainty is high and real-time disturbance rejection is critical. | Motion control, robotics, electromechanical drives. |
Adaptive Control
| Method | How it Works | Advantages | Risks | When to Use | Typical Applications |
|---|---|---|---|---|---|
| Model Reference Adaptive Control | Adjusts controller parameters online so system output tracks a reference model. | Guarantees asymptotic tracking under assumptions, systematic Lyapunov-based design. | Requires persistency of excitation, risk of instability if adaptation is too aggressive. | When system dynamics vary with operating conditions and a reference model is available. | Aerospace, robotics, systems with changing dynamics. |
| Sliding Mode Control | Drives system state to a “sliding surface” and maintains motion on it using discontinuous control law. | Strong robustness to matched uncertainties and disturbances, simple design. | Chattering (high-frequency switching), may excite unmodeled dynamics. | When robustness to uncertainty is key and actuators can tolerate fast switching. | Motor drives, aerospace, uncertain nonlinear systems. |
| Iterative Learning Control | Learns control corrections over repeated trials of the same task by updating input each iteration. | Very high accuracy after sufficient repetitions, simple update laws. | Requires repetitive tasks, sensitive to unmodeled dynamics or noise accumulation. | When the same trajectory/task repeats and performance must improve each trial. | Robotics, batch processes, repetitive manufacturing processes. |
Constraint Enforcement
| Method | How it Works | Advantages | Risks | When to Use | Typical Applications |
|---|---|---|---|---|---|
| Control Barrier Functions | Enforce safety constraints by restricting control inputs to maintain system states within a safe set. | Formal safety guarantees, compatible with other controllers (QP formulation). | May conflict with performance objectives, requires accurate constraint modeling. | When safety-critical operation is essential and constraints must always be respected. | Autonomous driving, robotic safety constraints. |
| Passivity-Based Control | Uses passivity and dissipative properties to design controllers ensuring stability via energy shaping. | Strong stability guarantees, modularity (interconnections preserve passivity). | May be conservative. | When interconnection stability is critical (e.g., multi-agent, networked, energy systems). | Power systems, teleoperation, mechanical systems. |
Parameter Autotuning
| Method | How it Works | Advantages | Risks | When to Use | Typical Applications |
|---|---|---|---|---|---|
| PID Autotuning | Indirect data-driven tuning estimates key frequency response points from perturbations and designs a controller to meet desired speed and robustness. | No explicit system ID required, uses experimental data. | Limited to PID structure, performance depends on data quality | When you want data-driven PID controller tuning without building a detailed plant model. | PID tuning, systems where plant modeling is hard or unknown. |
| Virtual Reference Feedback Tuning | Direct data-driven tuning identifies controller parameters by fitting to desired closed-loop behavior without explicit plant model. | No explicit system ID required, fast offline tuning, uses experimental data. | Requires good excitation data, performance depends on data quality, limited to chosen controller structure. | When you want data-driven controller tuning without building a detailed plant model. | PID tuning, systems where plant modeling is hard. |
| Extremum Seeking Control | Online, model-free optimization: perturbs input with small oscillations, measures output, adjusts control to drive system toward performance extremum (min/max). | No plant model needed, adapts to time-varying conditions, handles nonlinear unknown systems. | Need to specify learning rate, can be sensitive to noise depending on design parameters, requires persistent excitation. | When the objective is performance optimization in real time, especially with uncertain or time-varying plants. | Maximum power point tracking (MPPT), antilock braking. |
See Also
Baseline PID Controller Design