Transport Delay
設定した時間分だけ入力を遅延
ライブラリ:
Simulink /
Continuous
説明
Transport Delay ブロックは、指定した時間分だけ入力を遅らせます。このブロックを時間遅延のシミュレーションに使用できます。このブロックへの入力は連続信号にする必要があります。
シミュレーションの開始時に、このブロックは [初期出力] パラメーターを出力します。これはシミュレーション時間が [時間遅延] パラメーターを超えるまで続きます。その後、ブロックは遅延入力を出力し始めます。シミュレーション中は、ブロックによって入力点とシミュレーション時間がバッファーに保存されます。バッファーのサイズは [初期バッファー サイズ] パラメーターで指定します。
保存された入力値の時間に対応しない時間での出力が要求されると、ブロックはデータ点の間を線形内挿します。遅れがステップ サイズより小さい場合、ブロックは最後の出力点から外挿するため、結果が不正確になることがあります。ブロックには直達がないので、現在の入力を使ってその出力値を計算することはできません。たとえば、ステップ サイズが 1 で現在の時間が t = 5 の固定ステップ シミュレーションを考えます。遅れが 0.5 の場合、ブロックは t = 4.5 でデータ点を生成する必要があります。最後に格納した時間は t=4 なので、ブロックは前進外挿を行います。
Transport Delay ブロックは、離散信号の内挿は行わず、代わりに、要求された時間での離散値を返します。
このブロックは、サンプル ヒットのみで出力を遅らせ、保持する Unit Delay ブロックとは異なります。
ヒント
linmod を使って、Transport Delay ブロックを含むモデルを線形化することは避けてください。詳細については、モデルの線形化を参照してください。
例

PID Controller ブロックを使用したアンチワインドアップ制御
この例では、アクチュエータが飽和した際にアンチワインドアップ方式を使用して PID コントローラーの積分動作によるワインドアップを防ぐ方法を示します。Simulink® の PID Controller ブロックには、2 つの組み込みアンチワインドアップ手法 (back-calculation および clamping) と、より複雑な産業上のシナリオを処理するためのトラッキング モードが備わっています。PID Controller ブロックがサポートしているいくつかの機能により、産業上の一般的なシナリオにおけるコントローラーのワインドアップという問題に対処できます。
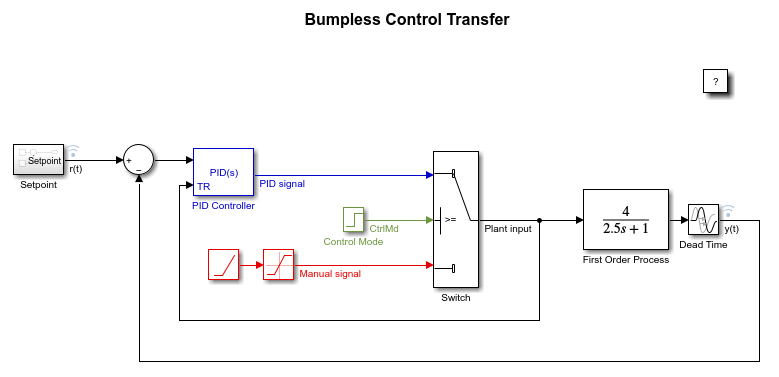
手動と PID 制御の間のバンプレス制御移行
この例では、手動制御から比例-積分-微分 (PID) 制御へ切り替える際にバンプレス制御移行を行う方法を示します。このモデルでは Simulink® の PID Controller ブロックを使用してデッド タイムを含む 1 次プロセスを制御します。
端子
入力
出力
パラメーター
ブロックの特性
データ型 |
|
直達 |
|
多次元信号 |
|
可変サイズの信号 |
|
ゼロクロッシング検出 |
|
拡張機能
バージョン履歴
R2006a より前に導入