Initial state
Option to specify initial model state or operating point for simulation
Model Configuration Pane: Data Import/Export
Description
The Initial state parameter specifies whether the model loads initial states or an operating point at the start of simulation and the initial state or operating point from which to simulate.
Settings
off (default) | onoffBy default, the model does not load initial states or an initial operating point at the start of simulation. The simulation uses default initial states and initial conditions specified in the model.
onThe simulation starts from the specified initial state or operating point. In the text box, specify the name of the variable that contains the initial state or operating point. For example, the initial state could be a
Simulink.op.ModelOperatingPointobject saved from a prior simulation of the same model.To specify the most complete initial state information, use a
ModelOperatingPointobject. The model operating point contains complete information about the state of the simulation, including block states, hidden block states, the state of the solver and execution engine, and output values for some blocks. When you use a model operating point as the initial state, the simulation results are the same as a simulation that runs from the beginning. When you specify initial states using logged states data alone, the simulation results might not match. For more information, see Specify Initial State for Simulation.When you specify logged states data as the initial state for simulation, use the
Dataset,Structure, orStructure with timeformat. These formats support several options that theArrayformat does not support:Associating initial state values with the path to the block to which the state applies. This association removes dependencies on the block execution order.
Using different data types for each initial state value.
Initializing a subset of states.
Initializing states for a model hierarchy.
Array format is not recommended for specifying the initial state. By default, the software issues a warning if you specify the initial state as an array.
Because the
Arrayformat does not include block path information, the software pairs the state values in the specified array with block states in the model based on:The order of the state values in the array
The execution order for the model
The execution order can change from one simulation to the next if you modify the model and from one release to the next even if you do not modify the model. If the order of the states in the array does not match the execution order as intended, the simulation can produce unexpected results.
Examples
Open the model vdp.
mdl = "vdp";
open_system(mdl);Configure the model to save the final operating point at the end of simulation.
On the Modeling tab, under Setup, click Model Settings.
In the Configuration Parameters dialog box, select the Data Import/Export pane.
On the Data Import/Export tab, select Final states and Save final operating point.
Click OK.
Alternatively, create a Simulink.SimulationInput object to store the parameter values for the simulation. Then, use the setModelParameter function to specify the parameter values to use in the simulation.
simIn = Simulink.SimulationInput(mdl); simIn = setModelParameter(simIn,"SaveFinalState","on"); simIn = setModelParameter(simIn,"SaveOperatingPoint","on");
Set the stop time for the simulation to 10 seconds. On the Simulation tab, under Simulate, in the Stop Time box, enter 10, or use the setModelParameter function to specify the value of the StopTime parameter for the simulation.
simIn = setModelParameter(simIn,"StopTime","10");
Simulate the model.
out = sim(simIn);
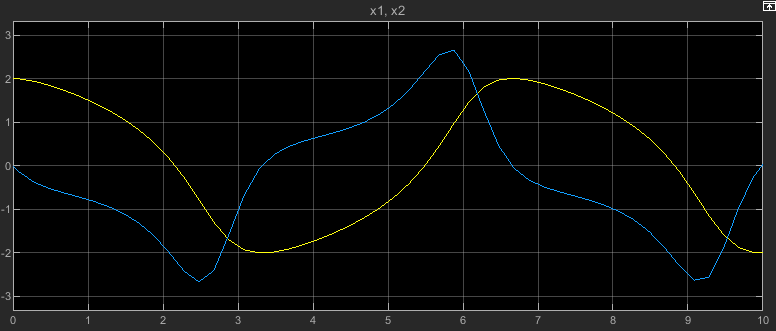
To view the simulation results, double-click the Scope block in the model. The plot in the Scope displays the values of the signals x1 and x2 over the 10-second simulation.
Resume the simulation by using the operating point you saved at the end of the first simulation as the initial operating point for the second simulation.
Get the final operating point from the first simulation from the Simulink.SimulationOutput object out.
vdpOP = out.xFinal;
Specify the operating point as the initial state for the simulation.
On the Modeling tab, under Setup, click Model Settings.
In the Configuration Parameters dialog box, on the Data Import/Export pane, select Initial state.
In the text box, enter
vdpOP.Click OK.
Alternatively, create another Simulink.SimulationInput object to configure this simulation. Then, use the setInitialState function to specify the initial state.
simIn2 = Simulink.SimulationInput(mdl); simIn2 = setInitialState(simIn2,vdpOP);
Set the stop time for this simulation to 20. On the Simulation tab, under Simulate, in the Stop Time box, enter 20, or use the setModelParameter function to specify the value of the StopTime parameter for the simulation.
simIn2 = setModelParameter(simIn2,"StopTime","20");
Simulate the model again, resuming the prior simulation by starting this simulation from the final operating point saved in the first simulation.
out2 = sim(simIn2);
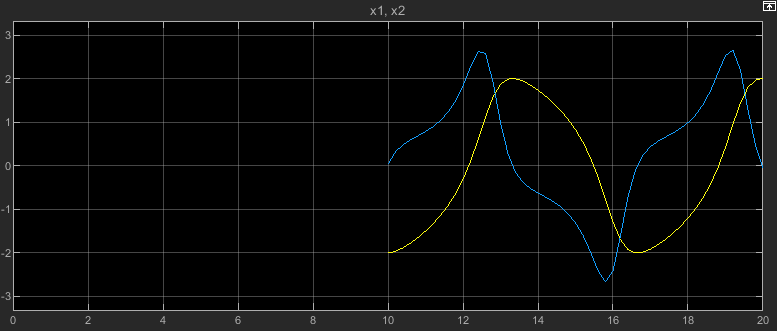
The plot in the Scope window updates to show the data from this simulation. The time axis starts at 0 and goes to the simulation stop time of 20. Because this simulation started from the initial operating point from the first simulation, which ended after 10 simulation seconds, the plot shows the values of the signals x1 and x2 only between simulation time 10 seconds and 20 seconds.
Tips
Initial states loaded using the Initial state parameter override initial conditions and initial values specified in the model.
To load initial state data for a model that contains bus-valued states, use the
Datasetformat.By default, the software issues a warning when you specify initial states using the
Arrayformat. To configure this diagnostic behavior, use the Initial state is array parameter.The Initial state parameter does not load initial state data from a data dictionary. When a model uses a data dictionary and you disable model access to the base workspace, the Initial State parameter still has access to resolve variables in the base workspace.
Loading an initial state or operating point that uses the
Datasetformat is not supported for rapid accelerator or deployed simulations if one or more states in the model has any of these data types:halfstringCharacter vector
Fixed-point
Loading an initial state or operating point that uses the
Datasetformat is not supported if a referenced model that simulates in a mode other than normal contains one or more states that have any of these data types:halfstringCharacter vector
Fixed-point
Programmatic Use
Parameter: LoadInitialState |
Value:
"on" | "off" |
Default:
"off" |
Parameter: InitialState |
| Type: string | character vector |
Value:
Simulink.op.ModelOperatingPoint object |
Simulink.SimulationData.Dataset object | structure |
matrix |
Default:
"xInitial" |
Version History
Introduced before R2006aSee Also
Model Settings
- Final states | Save final operating point | Initial state is array | Operating point interface checksum mismatch | Operating point contents checksum mismatch | Operating point object from a different release