Simscape リアルタイム シミュレーション
Simscape プラント モデルをリアルタイム ターゲット マシンに展開する
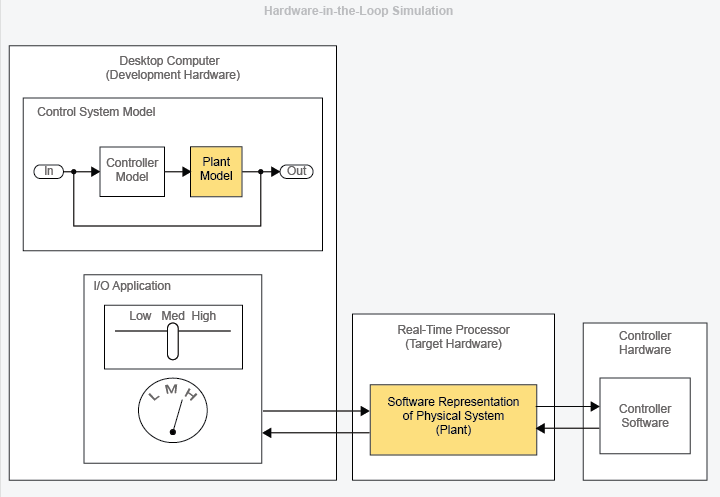
ハードウェアインザループ (HIL) テスト用のプラント モデルとして Simscape モデルを使用できます。HIL 向けにモデルを準備する際には、リアルタイム速度でターゲット ハードウェア上でモデルを実行できるようになるまで、パフォーマンスと忠実度のバランスを取る変更を加えます。デスクトップ コンピューターから、Simscape を使用してプラント モデルを開発してコントローラー モデルと統合できます。モデルがリアルタイム用に準備でき、コントローラーのハードウェアとソフトウェアが利用可能になったら、プラント モデルをリアルタイム ターゲット マシンに展開します。次の図で HIL シミュレーション プロセスを示します。
ターゲット CPU のシミュレーションを実行できるタイム ステップよりも小さなタイム ステップを必要とするアプリケーションでは、HDL Coder™ を使用してリアルタイム ターゲットにマウントされた FPGA にモデルを展開できます。モデルがリアルタイム ターゲット用に準備できたら、Simulink® Real-Time™ を使用してモデルを展開できます。
カテゴリ
- リアルタイム モデルの準備
参照結果の取得、パフォーマンスの最適化
- FPGA HDL コード生成
リアルタイム FPGA への展開用に Simscape モデルから HDL コードを生成する
- リアルタイム展開
ハードウェアインザループ シミュレーションのワークフロー、ホストからターゲットへのハードウェア インターフェイス、実行時パラメーター