リアルタイム モデルの準備
Simscape モデルをリアルタイム用に準備するには、ターゲット マシンにとって十分に小さなコストとタイム ステップで正確な結果が得られるように、パフォーマンスと忠実度のバランスを繰り返し取る必要があります。まず、モデルから参照結果を取得することから始めます。固定ステップ ソルバーを使用して参照結果と比較して正確な結果がモデルで生成されたら、リアルタイム ターゲットへのモデルの展開を試行できます。パフォーマンスと忠実度のバランスを取るために、必要に応じて次のステップを実行します。
複雑なブロックおよびパラメーター化の代わりに、最適なブロックまたはシステムレベルのブロックおよび最適なパラメーター化を使用する。
高速ダイナミクスのソースを取り除く。
数値的剛性のソースを取り除く。
ゼロクロッシングのソースを取り除く。
分割ソルバーを使用する。
モデルを分割する。
ソルバーの反復回数を最小化する。
FPGA への展開では、モードのソースを削減する。
高速ダイナミクスおよび数値的剛性に関するソルバーのパフォーマンスを解析するには、ソルバー プロファイラー ツールを使用します。固定ステップ、固定コストに変換する準備ができたら、simscape.getLocalSolverFixedCostInfo 関数を使用して、実行する非線形反復回数を判別します。
ツール
| ソルバー プロファイラー | ソルバー性能のボトルネックを特定します。 |
関数
simscape.getLocalSolverFixedCostInfo | Determine iteration requirement when transitioning to fixed cost (R2021b 以降) |
トピック
固定ステップ、固定コストの設定
- ソルバー プロファイラーを使用したモデル ダイナミクスの確認
ソルバー プロファイラーを使用してモデルのシミュレーションに影響する要因を特定します。 - リアルタイム シミュレーションのソルバー
指定される固定ステップ ソルバー、ステップ サイズおよび反復回数は、Simscape™ モデルのシミュレーションがリアルタイムでどのように実行されるかに影響します。 - Simscape のスティッフネス影響分析
Simscape ネットワークの全体的なシステムのスティッフネスに対する特定のブロック変数の効果を解析する。 - ステップ サイズと反復回数の選択
許容可能な精度と速度を提供するステップ サイズと反復回数の組み合わせを指定することで、Simscape モデルをリアルタイム シミュレーション用に最適化し、オーバーランを回避します。 - 計算コストの推定
リアルタイム ターゲット マシンで Simscape モデルのシミュレーションを実行する際にオーバーランが発生する可能性が高いかどうかを、計算コストを推定して判断します。
パフォーマンスの最適化
- ゼロクロッシングの削減
ゼロクロッシングを引き起こすコンポーネントを排除することで、固定ステップ シミュレーションの最小ステップ サイズを大きくし、Simscape モデルをリアルタイム対応にします。 - 分割ソルバーを使用したシミュレーションの高速化
Simscape 分割ソルバーを使用して、大規模な連立方程式を、解きやすい複数の小規模な連立方程式に変換することにより、パフォーマンスを改善する。
FPGA への展開
- Simscape ハードウェアインザループ ワークフロー入門 (HDL Coder)
Simscape ハードウェアインザループ ワークフローのモデル化のガイドラインと制限。 - Simscape Language Support for FPGA HIL Deployment (HDL Coder)
Simscape language support in Simscape Hardware-in-the-Loop Workflow. - Simscape サブシステム置換のモデリング ガイドライン (HDL Coder)
Simscape サブシステムを状態空間アルゴリズムに置き換えるための、Simscape モデル化のベスト プラクティス。 - Piecewise-Constant Resistor を線形スイッチド コンポーネントに置き換え (HDL Coder)
非線形コンポーネントをもつ Simscape モデルを線形スイッチド モデルに変換する。 - Estimate Achievable Target Frequency Without Running Synthesis (HDL Coder)
Estimate the optimal frequency that you want your Simscape models to achieve on FPGA without running synthesis. - Modeling Techniques for Simscape Converters for FPGA HIL Deployment (HDL Coder)
Model your power electronic converter by using hardware-in-the-loop (HIL) simulation in a real-time target machine.
汎用プラットフォーム
- 代替プラットフォームを使用する場合の要件
ハードウェア、ソフトウェア、コンパイラの最低限の推奨仕様に従い、カスタム スタンドアロン アプリケーションを使用してハードウェアインザループ (HIL) シミュレーション用の Simscape モデルを展開する。 - 組み込みおよび汎用リアルタイム リソース
Simulink® Coder™ および Embedded Coder® では、システム ターゲット ファイル (STF) を使用して、特定のリアルタイム オペレーティング システムとのインターフェイスに用いるコードを生成します。
注目の例

Configuring an EV Simulation for Multirate HIL
An electric vehicle model suitable for multirate Hardware-In-the-Loop (HIL) deployment. The example uses the Simscape™ Network Couplers Library to split the model into separate Simulink® subsystems that can be deployed at different sample rates. This allows you to run parts of the system (for example thermal components) with a slower sample time thereby reducing overall computational cost.
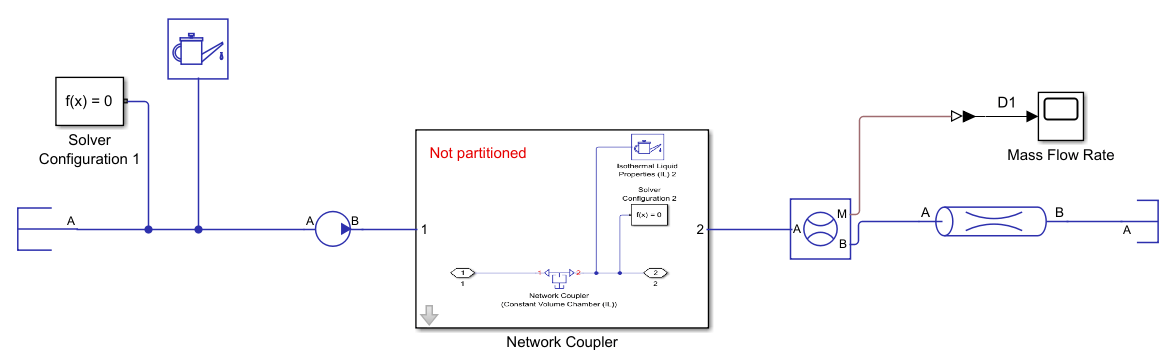
Partition a Model By Using a Network Coupler Block
Partition a Simscape model for parallel processing on real-time processors.