このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
tachorpm
タコメーター パルスからの RPM 信号の抽出
説明
[___] = tachorpm( では、x,fs,Name,Value)Name,Value のペアと前述のいずれかの構文を使用してオプションを指定します。
出力引数のない tachorpm(___) では、生成された RPM 信号およびタコメーター信号と検出されたパルスがプロットされます。
例
300 Hz でサンプリングされたタコメーターをシミュレートした信号を読み込みます。
load tacho
tachorpm を既定の値で使用して、RPM 信号を計算および可視化します。
tachorpm(Yn,fs)

RPM のピークを取得するため、当てはめる点を増やします。点が多すぎると、過適合になります。この結果は、ピーク周囲の領域にズーム インすることによって確認します。
tachorpm(Yn,fs,'FitPoints',600)
axis([0.47 0.65 1320 1570])
より良い結果を得るために適度な点の数を選択します。
tachorpm(Yn,fs,'FitPoints',100)

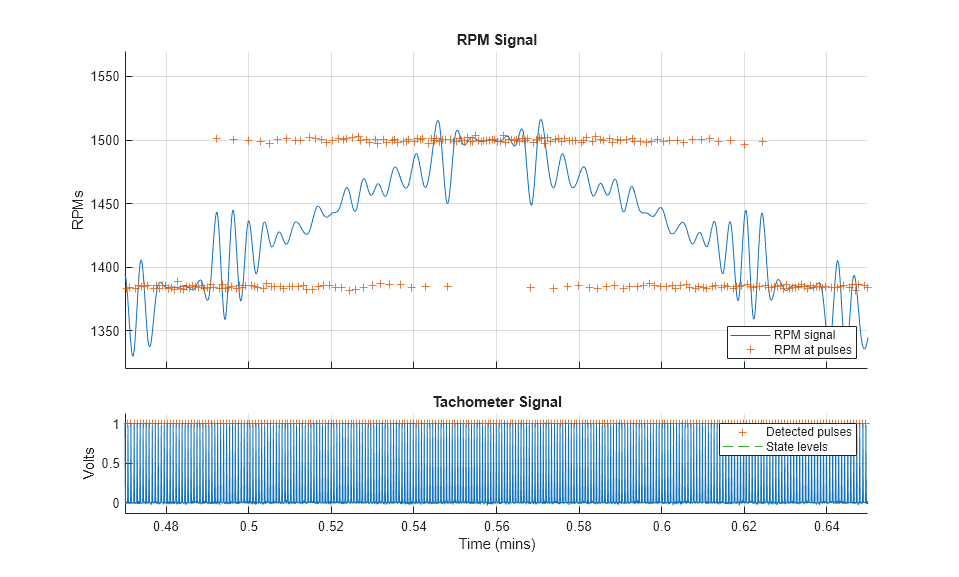
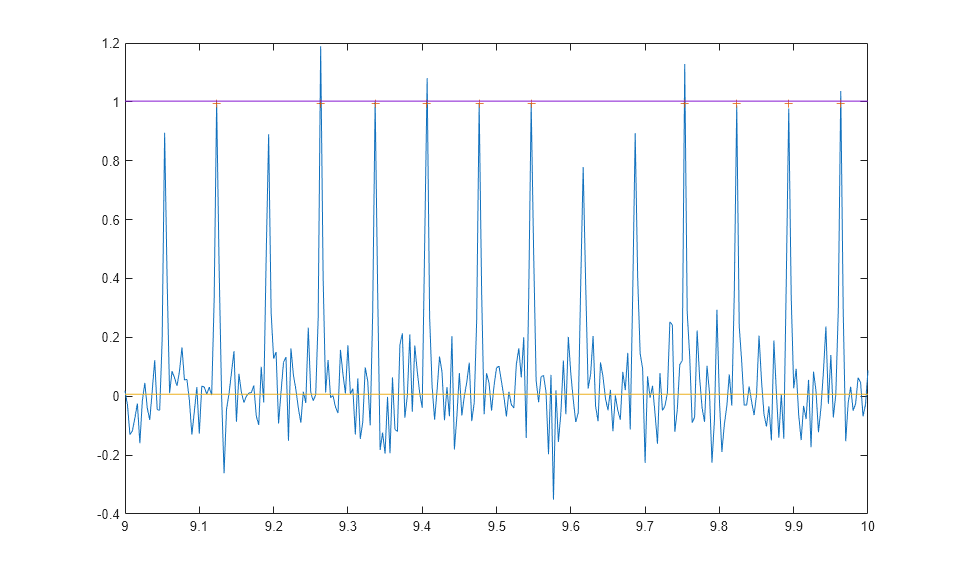
ホワイト ガウス ノイズをタコメーター信号に付加します。既定のパルス検出のメカニズムは、パルスを捉えずに、ギザギザになった信号のプロファイルを返します。この結果を 2 秒の時間間隔にズーム インすることによって確認します。
rng default wgn = randn(size(Yn))/10; Yn = Yn+wgn; [rpm,t,tp] = tachorpm(Yn,fs,'FitPoints',100); figure plot(t,Yn,tp,mean(interp1(t,Yn,tp))*ones(size(tp)),'+') hold on sl = statelevels(Yn); plot(t,sl(1)*ones(size(t)),t,sl(2)*ones(size(t))) hold off xlim([9 10])
パルスの検出を向上するために、状態レベルを調整します。
sl = [0 0.75]; [rpm,t,tp] = tachorpm(Yn,fs,'FitPoints',100,'StateLevels',sl); plot(t,Yn,tp,mean(interp1(t,Yn,tp))*ones(size(tp)),'+') hold on plot(t,sl(1)*ones(size(t)),t,sl(2)*ones(size(t))) hold off xlim([9 10])

入力引数
名前と値の引数
出力引数
アルゴリズム
関数 tachorpm は以下のステップを実行します。
statelevelsを使用して、タコメーター信号の Low および High の状態を決定します。risetimeとfalltimeを使用して、各パルスの開始および終了時間を検出します。次に、各パルスの時間を見つけるために、これらの測定値を平均します。diffを使用してパルスの中心間の時間間隔を求めます。さらに、RPM = 60 / Δt を使用してパルス間の中点で RPM 値を計算します。'FitType'を'smooth'に指定した場合、関数はスプラインを使用して最小二乗近似を実行します。'FitType'を'linear'に指定した場合、関数はinterp1を使用して線形内挿を実行します。
参照
[1] Brandt, Anders. Noise and Vibration Analysis: Signal Analysis and Experimental Procedures. Chichester, UK: John Wiley & Sons, 2011.
[2] Vold, Håvard, and Jan Leuridan. “High Resolution Order Tracking at Extreme Slew Rates Using Kalman Tracking Filters.” Shock and Vibration. Vol. 2, 1995, pp. 507–515.
拡張機能
バージョン履歴
R2016b で導入
参考
orderspectrum | ordertrack | orderwaveform | rpmfreqmap | rpmordermap | rpmtrack | statelevels