orderspectrum
平均スペクトルと振動信号の次数
構文
説明
[ は、次数-RPM マップおよび次数のベクトルから開始し、平均次数-振幅スペクトルのベクトルを計算します。spec,order] = orderspectrum(map,order)rpmordermap を使用して、map および order を計算します。map は線形にスケーリングされなければなりません。返される振幅は map のものと同じです。返されるスペクトルは線形にスケーリングされます。
出力引数を設定せずに orderspectrum(___) を使用すると、線形にスケーリングされた次数スペクトルの RMS 振幅が現在の Figure にプロットされます。
例
600 Hz で 5 秒間サンプリングされたシミュレーション信号を作成します。テスト中のシステムは、観察期間中に回転速度を 1 秒あたり 10 回転から 40 回転に上昇させます。
タコメーターの読み取り値を生成します。
fs = 600; t1 = 5; t = 0:1/fs:t1; f0 = 10; f1 = 40; rpm = 60*linspace(f0,f1,length(t));
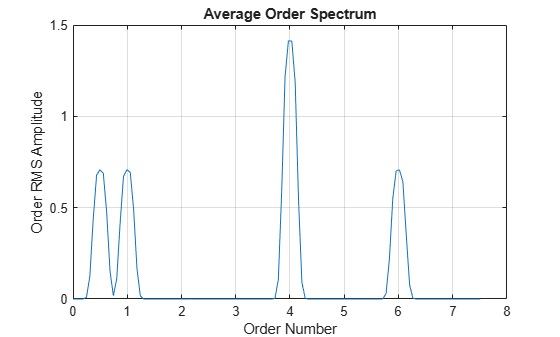
信号は、1、0.5、4 および 6 の次数をもつ、調和関係にある 4 つのチャープで構成されています。次数 4 のチャープの振幅は他のチャープの振幅の 2 倍です。チャープを生成するために、台形則を使用して位相を回転速度の積分で表します。
orderList = [1 0.5 4 6]; ph = 2*pi*cumtrapz(rpm/60)/fs; x = [1 1 2 1]*cos(orderList'*ph);
信号の次数-RPM マップを可視化します。
rpmordermap(x,fs,rpm)

信号の平均次数スペクトルを可視化します。スペクトルのピークは次数-RPM マップのリッジに対応します。
orderspectrum(x,fs,rpm)
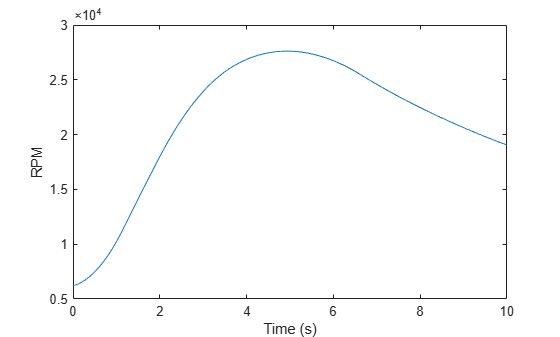
ヘリコプターのコクピットに設置された加速度計から取得したシミュレーション データを解析します。
ヘリコプターのデータを読み込みます。振動測定値 vib は、500 Hz のレートで 10 秒間サンプリングされています。データには線形トレンドがあります。トレンドを除去して、トレンドによる次数推定の質の低下を防ぎます。
load helidata.mat
vib = detrend(vib);非線形 RPM プロファイルをプロットします。ローターは、最大回転速度である 1 分あたり 27,600 回転に達するまで回転数を上昇させ、その後降下させます。
plot(t,rpm) xlabel("Time (s)") ylabel("RPM")
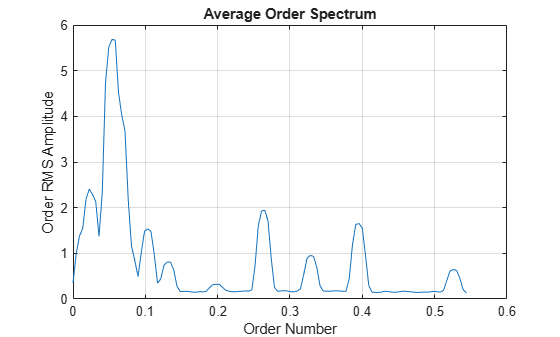
信号の平均次数スペクトルを計算します。既定の次数分解能を使用します。
orderspectrum(vib,fs,rpm)
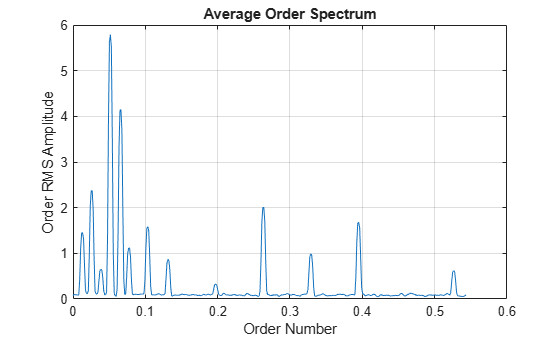
rpmordermap を使用して、より細かい次数分解能で計算を繰り返します。次数が低いほど、より明確に分解されます。
[map,order] = rpmordermap(vib,fs,rpm,0.005); orderspectrum(map,order)
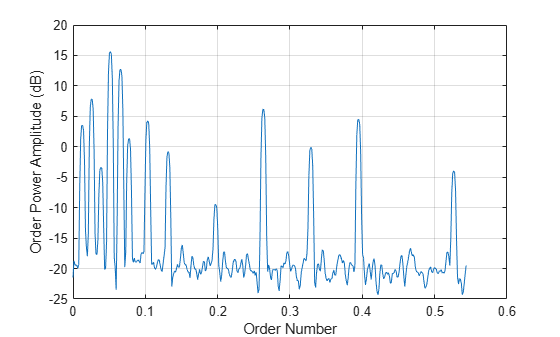
各推定次数のパワー レベルを計算します。結果をデシベルで表示します。
[map,order] = rpmordermap(vib,fs,rpm,0.005,Amplitude="power"); spec = orderspectrum(map,order); plot(order,pow2db(spec)) xlabel("Order Number") ylabel("Order Power Amplitude (dB)") grid on
入力引数
出力引数
参照
[1] Brandt, Anders. Noise and Vibration Analysis: Signal Analysis and Experimental Procedures. Chichester, UK: John Wiley & Sons, 2011.
[2] Vold, Håvard, and Jan Leuridan. “High Resolution Order Tracking at Extreme Slew Rates Using Kalman Tracking Filters.” Shock and Vibration. Vol. 2, 1995, pp. 507–515.